多传感器校准在自动驾驶汽车中如何工作?

自动驾驶汽车中高级驾驶辅助系统 (ADAS) 的多传感器校准通过将各种传感器(如摄像头、LiDAR 和雷达)对齐到一个统一的坐标系中,实现精确的感知和定位,从而确保准确的数据融合。
本文引用地址:https://www.eepw.com.cn/article/202506/471871.htm本文回顾了 ADAS 多传感器标定的类型和技术。
ADAS 传感器校准结合了单个传感器的内在考虑因素和系统级外在因素。本征校准考虑了一般因素,例如线性度、输出斜率和偏移,以及传感器特定的规格。传感器特定因素的示例包括:
摄像头 — 焦距、镜头畸变、分辨率、高动态范围 (HDR)、镜头聚焦速度、高灵敏度、低照度性能、LED 闪烁缓解(以最大限度地减少交通信号灯的影响)和低延迟。
LiDAR — 激光束角、视场 (FOV)、扫描速率、测距精度、角度分辨率和内部坐标系。
雷达 — 天线增益、频率、脉冲特性、范围、视场角、分辨率、测速精度以及检测各种类型物体/材料的能力。
Extrinsic calibration 检查传感器之间的空间关系,包括平移和旋转。它涉及校准相机、LiDAR 和雷达,以确保它们的坐标系对齐。例如,它可以验证对象级跟踪以及如何使用磁道级融合方案来融合数据。
ADAS 系统的外在标定可以结合使用基于目标和无目标的方法,或者只采用无目标技术来实现。
基于目标的校准
基于目标的校准(也称为受控环境校准或静态校准)使用具有特定形状和大小的目标在指定距离内校准 ADAS 传感器在静态设置中的性能。
静态 ADAS 校准需要特定的照明条件并且没有反射表面,以避免传感器混淆。校准目标用于校准和校准传感器(图 1)。

图 1.典型的基于目标的 ADAS 标定系统。图片来源:John Bean)
基于目标的 ADAS 校准的高度受控条件支持高精度校准。然而,使用受控环境也是一个限制,因为 ADAS 通常在道路上不受控制的环境中运行。因此,基于目标的 ADAS 标定通常与无目标标定结合使用。
无目标校准
基于目标的 ADAS 标定的局限性源于三种传感器模式提供的多种数据类型。摄像头生成 2D 图像,LiDAR 生成密集的 3D 点云,雷达提供稀疏的 4D 点云,其中第四维表示物体的速度。
通过将扫描工具连接到汽车的计算机并以指定速度行驶、跟随其他车辆并在明确标记的道路上导航,可以实现无目标校准。扫描工具可检测物体和道路标记,并使用算法根据实际环境校准传感器。
提出了一种基于自我监督学习 (SSL) 和深度神经网络的新无目标校准方法。在这种方法中,信号的一部分用于预测信号的另一部分。它已用于对雷达阵列进行超分辨率、对相机帧进行上采样或激光雷达测量,以改善校准结果。
在图 2a 中,显示了基于 SSL 的相机激光雷达校准。投影的激光雷达点云(按范围着色)和相机图像在左侧图像中明显未对齐;但是,可以使用 SSL 对齐它们,如右图所示。
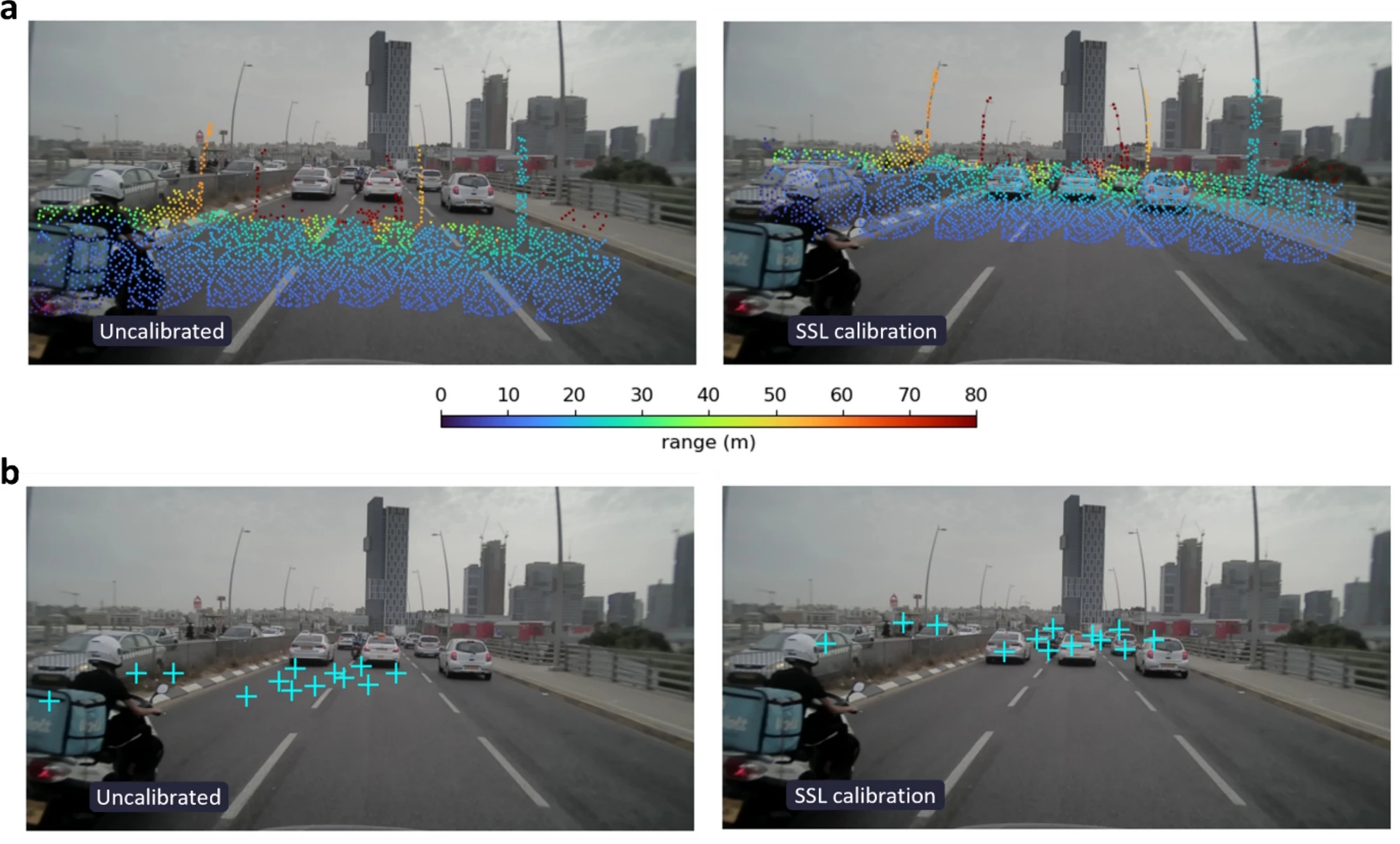 图 2.使用 SSL 进行相机-激光雷达校准(上)和相机-雷达校准(下)的示例。(图片:Scientific Reports))
图 2.使用 SSL 进行相机-激光雷达校准(上)和相机-雷达校准(下)的示例。(图片:Scientific Reports))
图 2b 说明了摄像头-雷达校准。校准前,由青色“+”标记表示的雷达与左侧图像中移动的车辆未对准。SSL 可用于校准摄像头雷达传感器并对齐其输出,如右图所示。
总结
ADAS 很复杂,具有多种传感器模式,需要不同类型的内在和外在校准。此外,整个 ADAS作需要多模态校准,结合使用基于目标和无目标的校准方法。最近,SSL 技术已应用于无目标 ADAS 传感器,以提供更好的校准结果。







评论