软件定义汽车:架构趋势和行业全景

软件定义汽车的整体架构可以分为四个层次:
(1) 硬件平台,异构分布式硬件架构;
(2) 系统软件层,包括 hypervisor、系统内核、POSIX、AUTOSAR 等;
(3) 应用中间件和开发框架,包括功能软件、SOA 等;
(4)应用软件层,包括智能座舱HMI、ADAS/AD算法、连接算法、云平台等。
广义上讲,作系统是指基于内核作系统的中间件,包括系统软件层(内核、管理程序、中间件)、功能软件层(常用功能模块和相关中间件)和 API。狭义上讲,作系统主要是指位于系统内核底层的 Vehicle Control OS 和 Automotive OS。
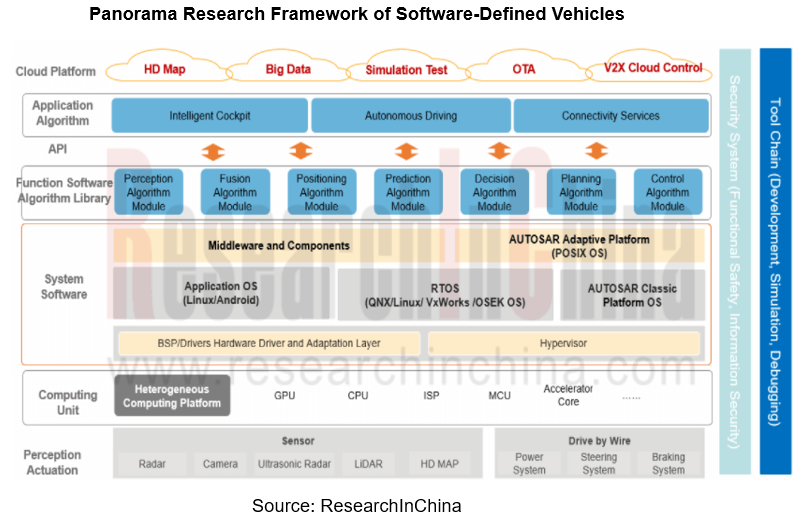
狭义的作系统是构建智能网联汽车的基石,而广义的作系统是应用开发的桥梁
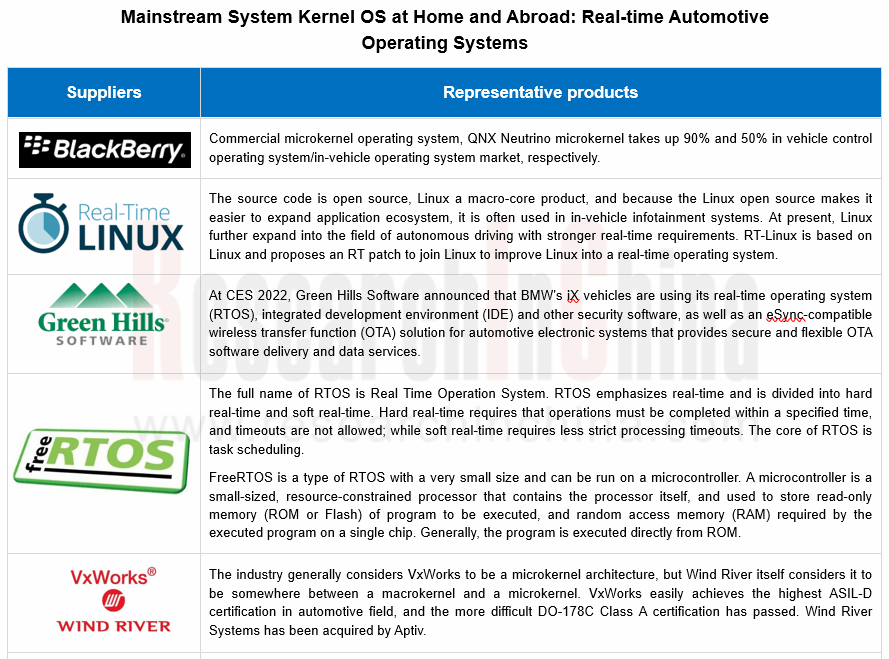
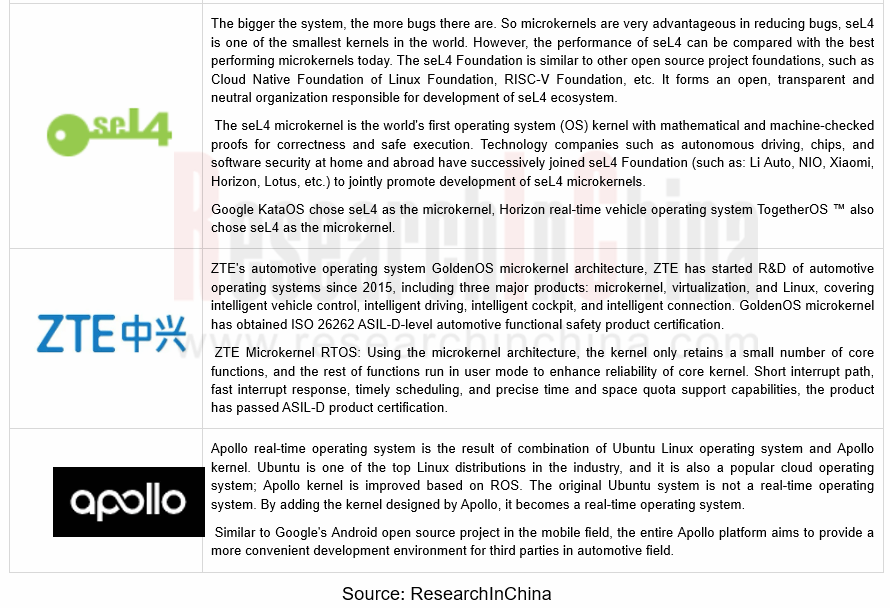
Microkernel,只需要实现基本的任务管理、内存管理、进程通信等,其他驱动都在用户端定义来实现,目前常用的智能驾驶作系统主要有Linux、QNX等RTOS(如free RTOS、VxWorks等)。基于第三代微内核技术的开源微内核 seL4 越来越受到国内汽车制造商和科技公司的关注。理想汽车、蔚来汽车、路特斯汽车、地平线机器人、小米等科技公司纷纷加入 seL4 基金会,共同推动 seL4 微内核的发展。
智能汽车的发展仍然面临“缺芯片”和“缺汽车作系统”的困境。前者已经受到了足够的关注,而后者仍需突破。目前,国外供应商 QNX (Blackberry)、Linux (开源) 和 Android (Google) 是狭义汽车作系统的核心参与者。例如,在智能座舱系统方面,QNX+Android 的结合是国内厂商选择的主流方案。总部位于中国的华为 HarmonyOS 和 Powered by AliOS 取得了一定的突破,但它们的自给率仍然很低。在智能驾驶系统领域,QNX 占据绝对垄断地位。
在自主可控的背景下,实时汽车作系统为填补汽车作系统空白指明了重要的发展方向。包括华为、中兴、百度 Apollo 和斑马智能驱动器在内的许多国内科技公司都在寻求实时微内核作系统领域的突破。
广义上讲,作系统是开发者促进应用算法开发的桥梁,是包括狭义作系统、中间件等在内的开发平台。
我们将广义的作系统分为几类:
用于自动驾驶的通用作系统
智能座舱通用作系统
车云一体化通用作系统
典型的自动驾驶通用作系统包括 iSoft Infrastructure Software 的 AUTOSAR CP 和 AP 集成解决方案、百度 Apollo AI 开源平台、Autoware ROS2.0 开源平台、华为 AOS、TTTech MotionWise、Enjoy Move Technology 的 EMOS、AICC 的 ICVOS、ZF Middleware 等。
iSoft Infrastructure Software 基于 AUTOSAR CP 的量产,为安全域和高性能计算域提供 AUTOSAR CP+AP 集成解决方案。借助其云系统,它实现了智能连接。iSoft Infrastructure Software 的集成解决方案可应用于智能座舱领域、车辆控制系统领域和 ADAS/AD 领域。通过标准化不同作系统、底层硬件和协议软件的接口和架构,它构建了面向服务的软件架构。在智能座舱域和 ADAS/AD 域,iSoft Infrastructure Software 正在开发相应的作系统内核,以全面布局汽车基础软件平台。
此外,自动驾驶 SoC 芯片厂商并不满足于仅仅提供硬件,而且还在自动驾驶生态系统中寻求分一杯羹,以增加进入门槛。英伟达(Nvidia)推出了用于自动驾驶的DriveWorks开源平台,地平线机器人(Horizon Robotics)推出了TogetherOS?,这是一个具有安全微内核架构的实时汽车作系统。
整车厂也不甘示弱,正在考虑开发自己的自动驾驶作系统,尤其是第一批新兴汽车制造商利用 AUTOSAR Classic Platform +DDS 构建自动驾驶作系统(开发平台)。随着技术生态的不断成熟,转型中的新兴整车厂和整车厂正在努力自行开发自动驾驶作系统。
-Tesla.OS(版本)是特斯拉自己基于底层 Linux 开发的。在功能软件方面,它支持深度学习编程框架 PyTorch。
-大众。作系统基于 Linux+AUTOSAR Adaptive,具有软件和 I/O 功能以及 SOA 的解耦功能。
-丰田的 Woven Planet Group 正在将 Apex.OS SDK 集成到其自己的车辆开发平台 Arene 中。Apex SDK 将处理安全关键型应用程序,旨在加快自动驾驶软件开发并最终将其引入量产车辆。
-理想汽车正在开发自己的 Li OS,并计划打造跨域智能作系统平台。Li OS 以自动驾驶为目标,未来将与智能车辆控制和智能座舱连接。
在汽车中间件(AUTOSAR、ROS2、Cyber RT)方面,不同的自动驾驶作系统供应商有不同的选择。例如,百度 Apollo 使用自主开发的 CyberRT,Autoware 采用 ROS2,其他供应商欢迎 AUTOSAR Classic 和 AUTOSAR Adaptive。近年来,Apex.AI OS(与 ROS 2 API 兼容)得到了一些欧洲 OEM 和 Tier1 供应商的广泛支持。Apex.AI 已被大陆集团、丰田、采埃孚、捷豹路虎、沃尔沃、海拉和戴姆勒卡车等众多汽车行业的领先企业投资。
在自动驾驶领域,中间件的功能涉及通信、模块升级、任务调度和驱动管理,但其主要功能在于通信。通信中间件(DDS、SOME/IP、MQTT)的引入可以帮助开发人员提高效率。目前,通信中间件主要包括 SOME/IP、DDS 和 MQTT。目前,SOME/IP 和 DDS 是自动驾驶中应用最广泛的两种通信中间件。
SOME/IP通信中间件
SOME/IP中间件提供商包括AUTOSAR工具链供应商,如Vector、ETAS、EB等国外公司,以及以iSoft基础设施软件、经纬海润科技等为代表的国内公司。GENIVI 联盟提供 SOME/IP 的开源版本。
DDS 通信中间件
商业闭源通信中间件主要以 RTI Connext DDS 为代表,占据了 80% 以上的市场份额。小鹏汽车是中国第一家将 Connext DDS 应用于自动驾驶汽车的企业。HoloSAR 是 HoloMatic Technology 的自动驾驶中间件,也集成了 RTI Connext DDS。
其他开源通信中间件包括 OPEN DDS、FAST DDS、Cyclone DDS 等。近年来,涌现出许多通信中间件产品,包括博世 ETAS 的 iceoryx、Greenstone 的 Swift 和 MotionWise Cyclone DDS。此外,新版 AUTOSAR Adaptive 在通信管理方面加强了 DDS,iSoft Infrastructure Software 开发的 AP 产品支持第三方 DDS 的集成。
MQTT 通信中间件
可用于低带宽、不可靠的网络场景,基于物联网通信协议 MQTT 的云平台提供远程设备的数据传输和监控。
自动驾驶工具链软件正在成为一个竞技场
自动驾驶系统由感知、规划和决策组成。算法研发的关键主要在于数据采集、感知模型训练、仿真测试和实车测试等。感知和规划构成了数据生成的主要部分,包括数据收集、数据清洗和数据标注。
通过一系列工具链,形成完整的自动驾驶全链条数据闭环开发流程,具有全闭环和自我成长的特点。这给主要 OEM 和 Tier1 供应商在开发自动驾驶系统时构成了重要的技术障碍。涉及的软件和数据服务包括:
AI 深度神经网络学习软件
涉及的软件/框架主要包括 TensorFlow/ PyTorch/ OpenCV/ TensorRT 等。在中国,百度已经推出了 Paddle Paddle,华为也发布了 MindSpore。
Transformer 神经网络模型可以较好地实现时空维度的建模,并已大规模应用于生产自动驾驶汽车:
Transformer 是特斯拉 FSD 系统算法中的核心模块之一。提取图像特征后,结合 Transformer、CNN 和 3D 卷积等 AI 神经网络算法,完成跨时间图像融合,从而在 2D 图像形成的基础上输出 3D 信息。
在国内,Haomo.AI 提出了将 Transformer 与海量数据进行有效集成。Haomo.AI 的 MANA 数据智能系统采用 Transformer 在底层融合视觉和 LiDAR 数据,进而实现对空间、时间和传感器的深度感知。
小鹏 G9 部署了 Transformer:经过不断优化,动态 XNet 所需的 122% 的 Orin-X 算力现在已经降低到 9%。
自动驾驶数据采集与自动标注系统
根据 IDC 的数据,到 2025 年,中国人工智能数据采集与标注服务的市场规模将达到 123.4 亿元,主要由自动驾驶汽车的数据采集和标注驱动。因此,对数据收集、处理、存储、训练软件和工具的需求很大。
Xnet 是小鹏汽车的“下一代感知架构”,当它与车内所有传感器相结合时,可以实时生成“高清地图”。通过动态 XNet,可以更准确地识别动态对象的速度和意图。XNet 需要大量的数据收集、注释、训练和部署。小鹏自主研发了自动标注系统。
但是,许多其他汽车制造商可能会与合作伙伴合作进行数据收集和注释。典型供应商包括 Speechocean(全球 AI 训练数据服务提供商)、华为章鱼(数据采集、训练和模拟服务)、Vector(CANape,数据采集工具)、澳鹏中国(AI 数据收集和标注服务)、ExceedData(数据采集和标注平台)等。
自动驾驶训练数据集
对于以深度学习为主要方法的自动驾驶,训练数据集是最关键的。算法是相似的(特别是,其中许多是开源的),因此无法判断哪个是最好的。深度学习数据集与最终结果相关,因此前者起着决定性的作用。训练数据集的覆盖面越广,标注越精细,分类越准确,类型越多,最终的自动驾驶性能越好。
许多自动驾驶公司,包括大众-福特合资企业 Argo 的 Argoverse、Waymo 的 Open、百度的 ApolloScape、英伟达 (PilotNet)、本田 (H3D)、安波福 (nuScense) 都披露了他们的一些训练验证数据集,一些提供了开源下载链接。现在最有影响力的是 KITTI、Waymo Open 和 Aptiv nuScenes。
国内具有地方特色的数据集较少,主要包括华为“ONCE”、车路协同自动驾驶数据集“DAIR-V2X”、金桥“JICD”数据集、厦门大学和上海交通大学联合发布的大规模驾驶行为数据集DBNet、习安交通大学和长安大学联合构建并披露的DADA数据集。
自动驾驶数据存储与计算中心(云服务)
数据存储与管理仅体现云服务的基本能力。汽车制造商对云服务的需求已从 IaaS 和 PaaS 转向 SaaS(软件即服务)。云服务提供商需要提供或集成统一的工具链,打通上下游环节,帮助汽车制造商快速打通数据闭环链。
小鹏汽车与阿里云联合建设了中国最大的自动驾驶智能计算中心福耀,将单机全精训练时间从 276 天缩短到 32 天。如果 80 台机器同时运行,只需 11 小时,处理速度提高了 602 倍。






评论