基于ADSP-BF561的车辆辅助驾驶系统硬件设计

引言
20世纪八十年代以来.电子技术和计算机技术快速发展,汽车行驶安全方面的研究也进入了一个崭新的领域。其发展方向主要体现在智能化的汽车主被动安全研究,其中安全辅助驾驶是当前国际智能交通系统研究的重要内容之一。目前CCD或CMOS摄像机配合性能优良和价格低廉的DSP处理器在车辆安全辅助驾驶领域中的应用也不断增加。其中ADI公司的Blackfin系列处理器基于ADI和Intel公司联合开发的微信号架构(Micro Signal Architecture.MSA).应用于交通标志识别、智能灯光控制、车道变换辅助、盲点识别、后视摄像机和停车辅助、自适应巡航系统(Adaptive Cruise Control,ACCl、夜间辅助驾驶和智能安全气囊等。因此对Black6n系列处理器的硬件开发为整个系统提供良好的研究平台和开发环境。
1 车辆辅助驾驶系统框架设计
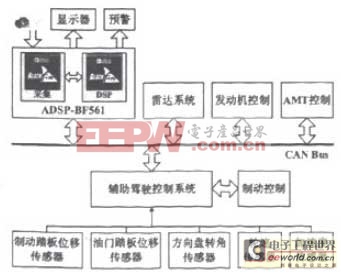
图1系统总体框架
车辆辅助驾驶的主要目的是为了提高汽车行驶的安全性。通过安装在车辆上的各种传感器获得车辆、道路状况以及周围车辆状况等信息.为驾驶员提供有效的预警信号.并在一定的条件下对车辆实施安全控制。系统主要由视觉系统、雷达系统、辅助驾驶控制系统、机械式自动变速控制系统、发动机控制系统、制动控制系统组成,感知车辆状态的传感有制动踏板位移传感器、油门踏板位移传感器、转向角度传感器、车轮转速传感器、加速度传感器,其框架结构如图1所示。
1.1环境感知系统
视觉传感器采用AIR-7010C CCD摄像机.通过ADV7183接入ADSP-BF561并行输入输出外围接口单元进行视频解码,雷达系统采用IBEO公司的LD-ML多层激光雷达系统.经过视觉处理算法后的图像数据与雷达数据进行数据融合.最终得出障碍物的有效信息,并通过CAN总线发送至辅助驾驶控制单元进行策略控制。
1.2底层控制系统
系统通过CAN总线获取有效的车辆行驶状态信息和车辆行驶环境信息,监控车辆的纵向和横向行驶安全,在一定的行驶条件下对车辆纵向行驶进行干预控制。辅助驾驶控制策略单元通过获取环境感知传感器与车辆状态传感器而对发动机转速的控制、机械式自动变速器fAM,I')档位和离合器的控制、制动系统的控制。
2 硬件系统的组成与设计
Blackfin处理器架构基于一个10级RISC MCU/DSP流水线和一个专为实现最佳代码密度而设计的混合16/32位指令集架构.除此之外还包含加速视频和图像处理的指令,因此Blackfin系列的处理器应用于通信、图像、语音等方面,ADSP-BF561是目前Blackfin家族中性能最高的一款处理器,其特点如下:
1)2个对称最高频率可达600MHz的高性能Blackfin内核;
2)每个内核包括2个16位MAC、2个40位ALU、4个8位视频ALU以及1个40位移位器:
3)内核电压0.8V-1.2V,兼容3.3V及2.5V I/O;,
4)328K Bytes片内存储器.每个内核32Kbytes的Ll指令SRAM/Cache、64Kbytes的L1数据SRAM/Cache、4KBytes的L1临时数据SRAM,128Kbytes共享的L2 SRAM:
5)2个并行输入/输出外围接口单元(PPI),支持ITU-R656视频数据格式:2个双通道全双工同步串行接13,支持8个立体声璐通道:2个16通道DMA控制器和1个内部存储器DMA控制器;12个通用32-bit定时肘数器;支持IrDA的UART;2个“看门狗”定时器;48个可编程标志引脚;1x-63x倍频的片内PLL。
2.1电源及复位电路
在设计电源电路时.需要考虑电源的负载能力、可靠性和稳定性。同时需要考虑系统需要多少种电源.ADSP-BF56l外部I/O供电电压为3.3V.内核供电电压为1.2V.因此系统需要+5V、+3.3V、+1.2V.首先通过DC-DC2405把车上的+24v转换成+5V.然后通过LT1765把+5V转换成+3.3V.ADP3336把+3.3v转换成+1.2v。复位电路采用ADM708复位芯片.并在电路中加入手动按钮。实现手动复位功能.方便程序的调试。
2.2时钟电路









评论