基于INTEL 11代芯片Tiger Lake 在AI 套件OPENVINO上所开发之智合科技车联网暨驾驶行为解决方案


随着 5G 及车联网发展,物流业主需要更具智慧的管理物流驾驶的系统,现行市场中仍处于安装行车记录器来进行事后究责,无法达到事前预警及驾驶行为有效的改善。本提案透过两支摄影机(车前影像及驾驶画面)进行在线影像分析,使用高效AI运算主机(HPC)分析车前状况及驾驶行为,当发生异常事件后,进行即时告警,并进行事件录影,透过4G/5G网路提供管理者查阅,让管理者随时检视行车状态(例如跟车过近或行人追撞危险),即时发现并修正驾驶行为异常(例如分心)。
其用途为:
· 保障驾驶安全
· 透过驾驶行为智能分析来修正驾驶行为,以保护用路人安全
解决方案
本系统特别适合应用于 运输业 的驾驶管理,我们使用:
· Intel 11 代 TigerLake Edge Computer 及 NCS2 神经棒来提供高效能的 AI 运算
· 使用二支 Webcam 撷取车前及驾驶影像,其中车前影像进行人车物件侦测及追踪,称为 ADAS;车内影像进行驾驶人脸识别 [5]及头部姿态角追踪 [2],称为 DMS
· 当系统侦测到 驾驶行为异常时,会即时提出警示,并进行后端录影
· 车队管理者可以透过 4G/5G 路由连入检测驾驶行为 异常状况,可做驾驶行为评分依据。
在开发过程中所用软硬体如下:
硬体:

软体:

1.系统架构-开发硬体平台:Intel 11 代 TigerLake Edge Computer+ Intel® NCS2 + Webcam x2 + 路由器
本系统由两支Webcam撷取车前及驾驶座影像,至车联网AI平台并将影像分流至OpenVINO平台进行AI inference,并将异常事件上传至驾驶监控平台,业主能透过驾驶监控平台得知目前驾驶状态。(图一所示)

图一 系统架构
2.技术架构-OpenVINO GStreamer [4]
在串流处理,我们采用 OpenVINO 平台搭配 GStreamer 及 OpenCV 方式进行。
AI 顺向使用 OpenVINO 预训练模型 [1],主要有三类:
· 车前物件侦测及属性识别
· 人脸检测及头部姿态角追踪
· 人脸识别
影像输入,可透过 Web Camera 或 档案方式输入,Inference 后的影像输出到二路 V4L2 装置 [3]
使用 GStreamer 连接 ADAS 及 DMS 所需的预训练模型(由OpenVINO提供),将 Inference 后的结果,由 MQTT 传至团队开发的 AI 智能驾驶行为分析程式进行分析,使用 OpenCV 进行 online 贴图,并将驾使行为异常结果储存于资料库,管理者可透过 本团队开发之驾驶监控平台进行异常事件的检索。(图二所示)

图二 技术架构图
3.ADAS Pipeline
图三为 GStreamer 连接 OpenVINO Model(人、车、自行车辨识)、(人物属性辨识)、(车辆属性辨识)之 ADAS Pipeline:
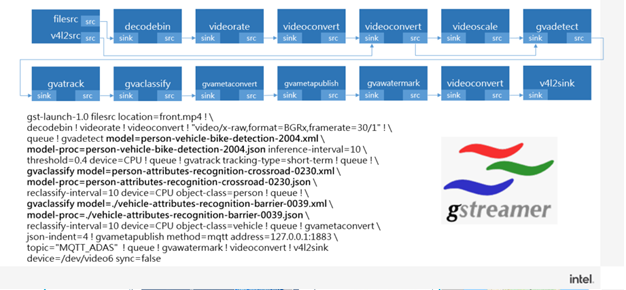
图三 ADAS Pipeline
DMS Pipeline
图四为 GStreamer 连接 OpenVINO Model(头部姿态角辨识)、(人脸辨识)之DMS Pipeline:

图四 DMS Pipeline
成果介绍短片
成果介绍
· 安装模拟场景

图五 模拟场景
· ADAS 与 DMS 功能介绍及触发条件
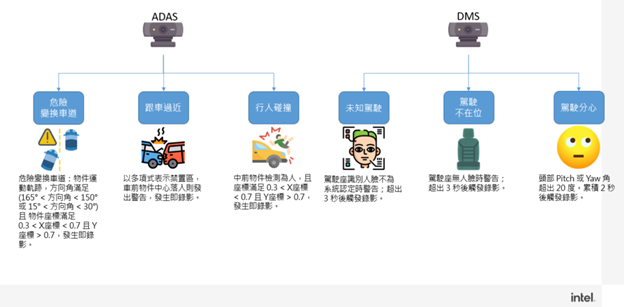
图六 功能介绍
· 车机画面及驾驶监控平台 – 展示说明

图七 车机画面介绍

图八 驾驶监控平台操作步骤
· 各项Model使用CPU及VPU效能表现

图九 Model使用CPU及VPU效能
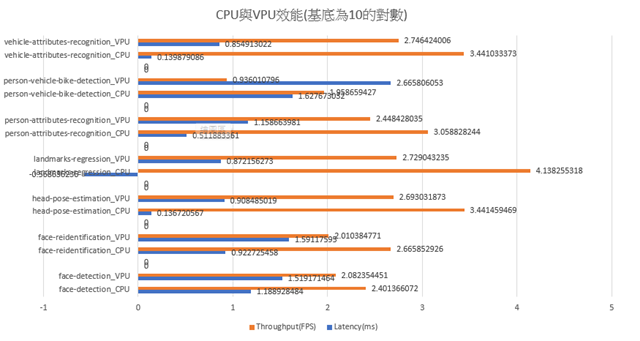
图十 使用 CPU 及VPU 效能图表 (因值域差异大,以 Log10 对数表示)

图十一 装置工作详细内容
以下概略说明主要硬体的使用方式及整合后系统效能的表现,其中CPU 占比最高,功能包含:
· 负责两项 AI 功能:车前物件侦测与追踪,及驾驶头部姿态角
· 应用端的逻辑及 online OSD 贴图
· 网页服务器及资料库
GPU 提供车机影像的显示,NCS2 神经棒负责第三个AI的功能:人脸侦测与识别。
输入资料量为两只 Web Camera 摄影机,其分辨率为 752×416@30 FPS,整合后的系统效能,张数大约落在 15~25 张。
本系统能即时分析辅助驾驶并让业主了解驾驶行为表现,可以进行员工教育,提升驾驶素质,保障驾驶及用路人的生命安全。









评论