一种智能循迹小车设计方案

摘要:本文设计了一种智能循迹小车,以16位单片机MC9S12XS128为核心控制器,通过摄像头采集道路轨迹信息,单片机对图像数据进行处理并采用PID控制算法调节智能循迹小车的行驶路径。实验证明,该智能循迹小车能够准确快速地对道路轨道进行辨识和跟踪,具有适应性强,实时性好,速度快的优点。
本文引用地址:https://www.eepw.com.cn/article/184612.htm引言
智能车作为智能交通系统的关键技术,融合了人工智能、自动控制、电子电路、信号处理等许多高新技术,具有广阔的应用前景。本文对小车自主驾驶技术展开研究,设计了一种能够沿着道路轨迹自动行驶的智能循迹小车。系统采用16位单片机MC9S12XS128[1-2]对摄像头采集的道路图像数据进行处理,采用PID控制调节小车行驶方向,使小车能够沿着道路自主行驶,无须外界附加人工控制。
总体方案
本文设计的智能循迹小车方案如图1所示。图像采集模块拍摄道路图像并输入到MC9S12XS128控制核心,进行处理以获得道路信息;通过光电编码测速传感器来检测车速,并采用单片机的输入捕捉功能进行脉冲技术计算速度和路程;舵机转向采用PD控制;电机转速控制采用PID控制,通过PWM控制驱动电路调整电机的功率;而车速的目标值由默认值、运行安全监控和基于图像处理的优化策略综合控制。
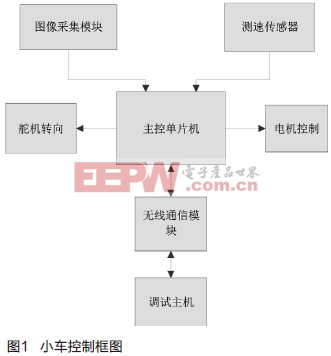
同时,为了便于在调试阶段对小车运行信息进行纪录以及优化控制算法,增加了无线通信模块,方便与主机进行调试信息传输。
硬件结构
主控板采用MC9S12XS128最小系统板,板上主要由时钟和复位电路构成。实验证明,MC9S12XS128可以稳定工作在80MHz,相比于以51单片机为控制核心的方案而言[3],处理能力有较大提升。另外,最小系统板将I/O端口引出供各模块使用。控制板主要由供电单元、电机驱动模块、摄像头接口构成。
供电单元
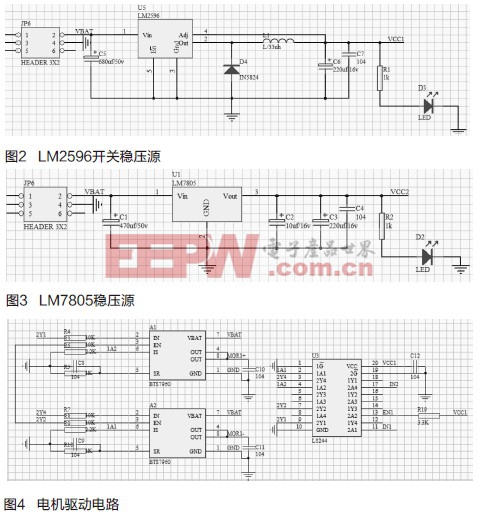
系统使用7.2V电池供电,电源经转换后输出5V给电机驱动模块、舵机、最小系统板和摄像头部分供电。为了提高系统稳定性,采用双稳压源方案。即对于电机驱动模块、舵机等要求转换效率较高的模块采用LM2596开关稳压源供电,而最小系统板和摄像头部分对电压稳定性要求较高,因而采用线性稳压源LM7805。LM2596和LM7805电源转换电路分别如图2和图3所示。

pid控制相关文章:pid控制原理
pwm相关文章:pwm是什么
51单片机相关文章:51单片机教程
伺服电机相关文章:伺服电机工作原理
pid控制器相关文章:pid控制器原理
脉宽调制相关文章:脉宽调制原理 摄像头相关文章:摄像头原理 锁相环相关文章:锁相环原理








评论