- 为了解决在复杂环境下人工操作难以实现自动化、智能化和精确性的问题,设计了一种具有自平衡功能的取放一体平衡机器人,并开发了其软硬件系统。该机器人利用OpenCV在NVIDIA Jetson TX2平台上进行图像处理,从而能够识别其周围的环境,并根据目标参数实现自动控制平衡机器人的运动。机器人的底盘采用STM32F4系列作为主控芯片,能够快速地获取电机等数据,并进行实时的PID控制等处理。
- 关键字:
202308
视觉识别
平衡机器人
机器人
PID控制
OpenCV
STM32

- 设计了一种基于手势识别的小车运动控制系统,该系统采用Arduino Nano作为微控制器,利用姿态角度传感器采集并处理手势指令数据,实现手势信息的识别,通过无线通信模块将手势指令发送给小车运动端,目标角度与实际角度等通过显示屏实时显示,最终达到手势控制小车前进、后退、转弯、停止等动作。本文完成了基于手势识别的小车运动控制系统的软硬件设计,将手势识别技术与移动机器人结合一体,在疫情环境下无接触运动控制方向研究具有实用意义。
- 关键字:
202302
手势识别
无线通信
PID控制
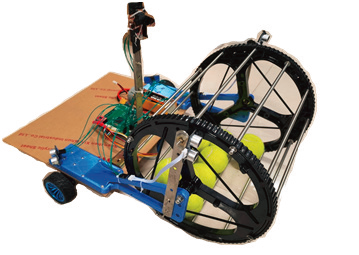
- 在专业的网球训练或者比赛结束后,需要专人对球进行回收,不仅浪费体力、增加了相应的人工成本,且捡球的效率低下,容易遗漏。本项目旨在代替人工,对网球进行全自动化的回收,节约人力、物力和时间成本,提高网球和羽毛球的训练效率。机器人先通过摄像头采集图像,然后进行基于机器视觉的目标检测、网球识别和定位,最后根据定位结果结合PID(Proportion Integration Differentiation)运动控制算法精准控制移动机器人回收网球。此外,机器人配有蓝牙模块,可以进行手动遥控控制。
- 关键字:
目标检测
网球识别
PID控制
202210
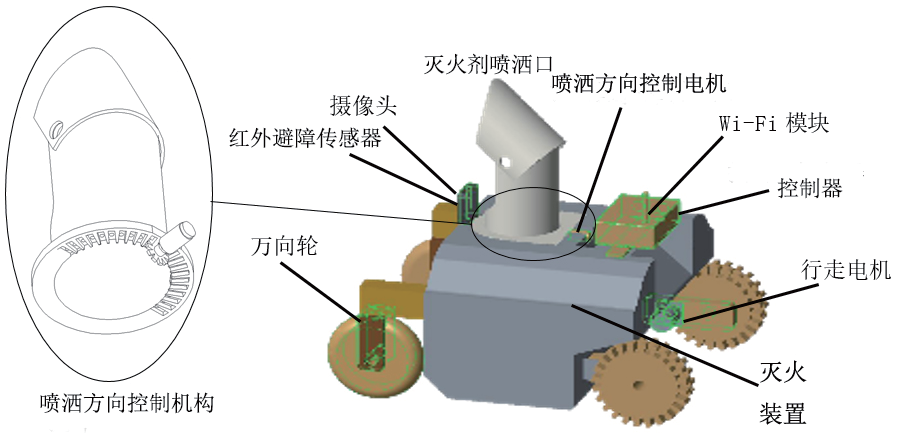
- 针对诸如石油化工、油罐区、大型仓库、公路隧道、高层建筑等特殊场所灭火困难的问题,设计了一款消防灭火机器人,其控制系统包括Android手机客户端和基于PIC的控制器,两者通过带路由器的WiFi模块通信,控制器选用PIC18F46K22单片机作为主控芯片,采用安装在机器人的视频摄像头、姿态检测的陀螺仪和红外避障传感器,实现对左右行走轮驱动电机和灭火剂喷洒方向控制电机等执行机构的控制,行走自动纠偏采用PID控制算法,从而实现对消防灭火机器人的远程控制,达到精准及时灭火的目的,对提高消防机器人的机电一体化、自动
- 关键字:
消防灭火机器人
电机控制
自动纠偏
PID控制
智能化
202112

- 本文介绍的智能车系统以stc8g2k64s4微控制器为核心控制单元,并根据比赛的具体情况,自制质量较轻、较为灵活性的车模,使用stc8g2k64s4作为系统的控制核心,让它根据所采取的数据输出PWM波使电机差速转向。最后,我们对车模存在的问题分析、改进。
- 关键字:
智能车
节能
无线充电
PID控制
202102

- 本文介绍的智能车系统以STC8g2k64s4微控制器为核心控制单元,并根据比赛的具体情况,自制质量较轻、较为灵活性的车模,使用STC8g2k64s4作为系统的控制核心,让它根据所采取的数据输出PWM波使电机差速转向。最后,我们对车模存在的问题分析、改进。
- 关键字:
智能车
节能
无线充电
PID控制
202102
- 基于STM32和FreeRTOS的嵌入式太阳能干燥实时监测和控制系统设计, 摘要:以ARM Cortex—M3处理器STM32F103VBT6为核心,应用AM2301温湿度传感模块实现对太阳能干燥室内温湿度参数的实时监测,采用数字PID控制技术控制鼓风机的转速,保持干燥室内的温度稳定,并通过继电器控制排
- 关键字:
STM32
FreeRTOS
嵌入式
PID控制
太阳能干燥

- 介绍了一种基于四旋翼飞行器快速、稳定探测和跟综地面上有色信标的系统。该系统由三部分组成:具有探测和跟踪功能的四旋翼飞行器、可遥控移动的有色信标小车和遥控终端(地面站)。四旋翼飞行器、可遥控移动的有色信标小车和遥控终端均采用Cortex-M3内核处理器。四旋翼飞行器能准确探测到地面上的有色信标位置,并在信标静止的情况下能快速稳定悬停在信标的正上方。在遥控终端控制有色信标小车任意方向移动,四旋翼飞行器能快速跟踪信标的移动。当四旋翼飞行器在有色信标小车上方一定距离和范围内时,四旋翼飞行器和小车同时发出声光报警。
- 关键字:
四旋翼飞行器
探测和跟踪
颜色识别
PID控制
201808
- 基于DSP的电子负载,是在传统的模拟电子基础上,利用电力电子技术、计算机控制技术及电力系统自动化设基于DSP的电子负载,是在传统的模拟电子基础上,利用电力电子技术、计算机控制技术及电力系统自动化设计,用数字控制环代替模拟控制环节,实现用于对各种电源进行考核的实验装置
- 关键字:
电子负载
DSP
控制器
PID控制
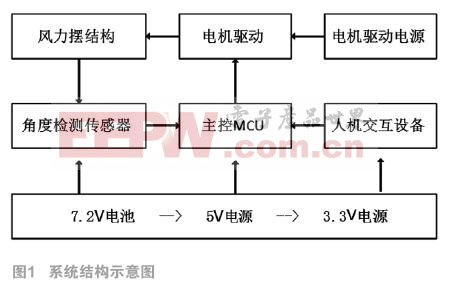
- 本文主要讲述利用Coretx-M4单片机控制风力摆运动轨迹的实现方法。系统根据当前加速度、角速度及图像信息,利用闭环控制算法调节电机,实现风力摆直线摆动、圆周摆动及定点静止等功能。系统响应速度快,控制精度高,交互操作界面简单易用,具有良好的交互性。
- 关键字:
风力摆
K60单片机
姿态解算
PID控制
201704

- 本文针对水下机器人(Remote Operated Vehicle)的功能和控制需求,建立了ROV运动学模型,设计了ROV闭环定向控制系统。基于PID控制方法,进行了Simulink数学仿真和模拟闭环仿真,计算机仿真试验表明,系统能够较快地稳定到设定值,能够满足对ROV定向控制的要求,航向闭环模拟试验验证了控制系统的可靠性。
- 关键字:
水下机器人
控制系统
闭环控制
PID控制
201701
- 基于STM32和FreeRTOS的嵌入式太阳能干燥实时监测和控制系统设计, 摘要:以ARM Cortex—M3处理器STM32F103VBT6为核心,应用AM2301温湿度传感模块实现对太阳能干燥室内温湿度参数的实时监测,采用数字PID控制技术控制鼓风机的转速,保持干燥室内的温度稳定,并通过继电器控制排
- 关键字:
STM32
FreeRTOS
嵌入式
PID控制
太阳能干燥
- 摘要:设计了一种新型的数字式智能速热饮水机控制系统。针对目前市场上的速热式饮水机存在的温度控制问题和干烧现象,设计基于STC1 5F204单片机的温控系统,以水箱水温、出水水温、电源电压和水流量为反馈量的PID控制
- 关键字:
即热式
温度控制
PID控制
- PID控制作为经典控制至今仍被广泛应用,面对精确数学模型时,PID控制能取得令人满意的效果。但在实际应用中,当被控对象数学模型变化时,难以实时调整PID参数,且大量被控过程机理复杂,被控对象数学模型建立复杂,
- 关键字:
模糊控制
PID控制
Matlab仿真
锅炉液位
- 系统组成原理该系统由四部分组成,即微机、伺服控制卡、交流伺服调速系统、传感检测。主控微机与控制卡相连,可以通过数据线发送位置或速度命令,设定pid调节参数,并进行数模(d/a)转换,该模拟信号经过交流伺服放大
- 关键字:
位置伺服系统
PID控制
- 引言由于逆变器传递函数不易得到,而且电压输出经常波动,传统的单纯PID控制难以达到快速和稳定的响应,而模糊控...
- 关键字:
DSP
逆变电源
PID控制
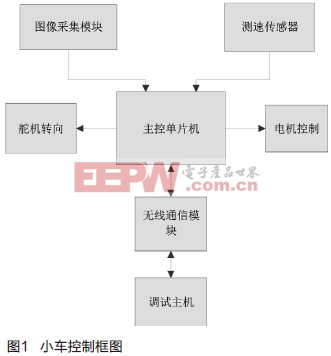
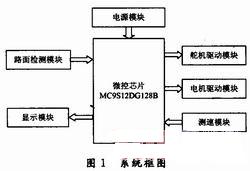
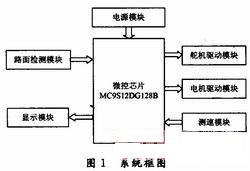
- 摘要:本文设计了一种智能循迹小车,以16位单片机MC9S12XS128为核心控制器,通过摄像头采集道路轨迹信息,单片机对图像数据进行处理并采用PID控制算法调节智能循迹小车的行驶路径。实验证明,该智能循迹小车能够准确快速地对道路轨道进行辨识和跟踪,具有适应性强,实时性好,速度快的优点。
- 关键字:
智能循迹小车
摄像头
PID控制
图像处理
PWM
201311
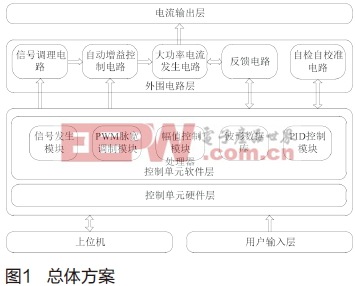
- 摘要:提出了一种基于串级PID控制算法的压控大功率电流源设计方案。该电流源在内环电路采用PID控制电路,提高电流响应速度;外环电路采用数字PID控制算法,精确控制电流输出的串级PID控制模式。与传统电流源相比,该电流源具有输出功率大,可输出多路不同波形电流,且幅值频率可调范围大,脉冲电流上升时间短等优点,具有更好的通用性。
- 关键字:
串级PID算法
压控大功率
电流源
PID控制
电路
201308
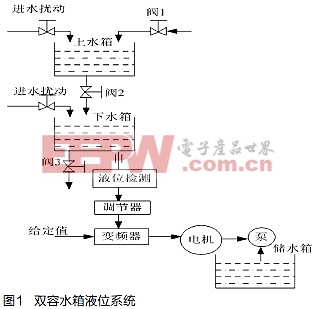
- 摘要:液位控制是工业过程中常见的过程控制,由于很难建立其精确的数学模型,常规PID控制得不到理想效果。本文将常规PID控制和模糊控制相结合,用模糊控制器来整定PID控制器的比例、积分、微分系数,对双容水箱液位进行控制,实验表明,采用模糊PID控制器后,控制系统的响应速度加快,超调量减小,过渡时间大大缩短,具有较好的稳定性和鲁棒性。
- 关键字:
PID控制
双容水箱
201303
- 摘要:现场总线控制系统(FCS)较封闭的DCS系统具有明显的优势,已成为过程控制的主流系统。在中科院沈阳自动化研...
- 关键字:
FF现场总线
控制算法
PID控制
- 0 引言
辐亮度标准探测器[1~3]是基于探测器的辐射定标中的关键组成部分,其光学核心部件滤光片辐射计的响应度受温度变化影响较大[3,4]。为了保证辐亮度标准探测器的精度和稳定性,本文设计了一种基于单片机精密温度
- 关键字:
系统
设计
温控
精密
单片机
基于
单片机
温度控制
PID控制
- 1引言目前,我国对大型锅炉的给水与蒸汽质量指标要求十分严格,因而需要对炉水品质连续监控。测量pH值...
- 关键字:
PLC
锅炉
PID控制
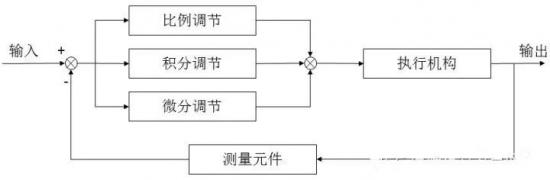
pid控制介绍
当今的自动控制技术都是基于反馈的概念。反馈理论的要素包括三个部分:测量、比较和执行。测量关心的变量,与期望值相比较,用这个误差纠正调节控制系统的响应。
这个理论和应用自动控制的关键是,做出正确的测量和比较后,如何才能更好地纠正系统。
PID(比例-积分-微分)控制器作为最早实用化的控制器已有50多年历史,现在仍然是应用最广泛的工业控制器。PID控制器简单易懂,使用中不需精确的系统模型等 [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473