- 针对市场对高性价比的电梯智能光幕的需求,基于对传统光幕的改进设计,给出了可靠的降本设计方案。通过对结构和PCBA工艺路线的改进设计,以及对核心电子组件的国产化等途径实现了综合降本。运用“时分复用”机制实现智能光幕的距离探测,巧妙地实现了灯管复用技术,降低了硬件成本;运用“多任务”模式实时更新输出状态,有效缩短了输出响应时间;运用独创的软件算法实现近距离盲点扫描的不足,改进了PCB板安装布局,消除了近距离平行干扰,有效提高了产品可靠性。
- 关键字:
202302 电梯光幕 智能光幕 光幕设计 光幕技术
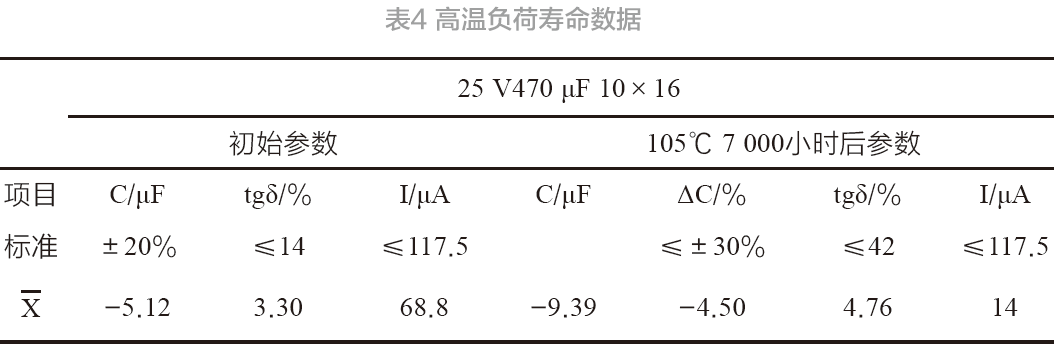
- 普通液态铝电解电容器具有成本优势,市场对更低ESR的产品有广泛的需求,通过对电解液、电解纸等主要材料的研究,采取提升电解液电导率,特殊纤维电解纸的选用,以及负极箔、胶塞的合理搭配,开发出极低ESR铝电解电容器,指标略优于日系同类产品。已广泛应用于汽车电子、充电桩、伺服驱动、通信电源、逆变器、智能三表、消费类电子等各类型电子设备控制电路中。
- 关键字:
202302 铝电解电容器 ESR 电解液
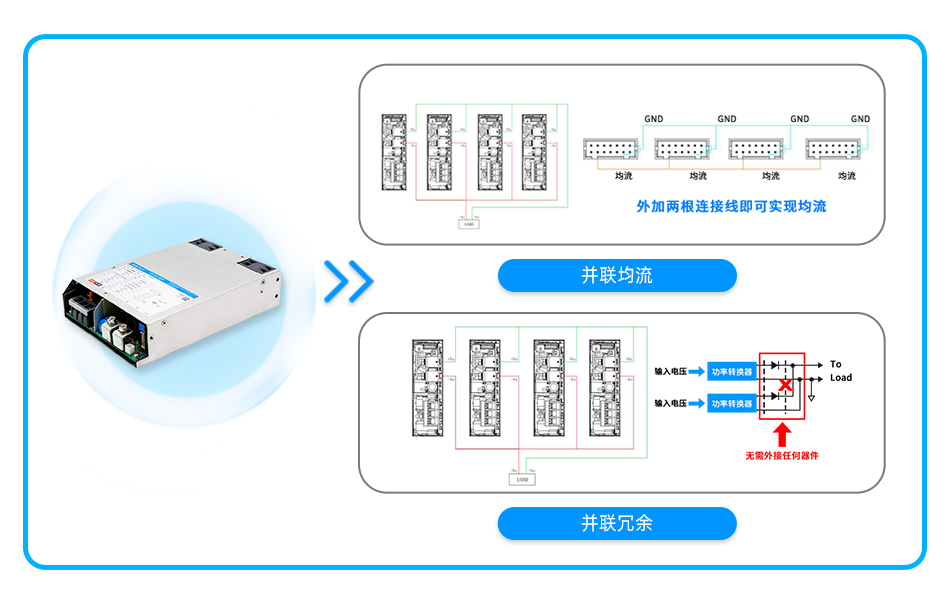
- 一丶引言目前市面上的设备通常都是使用1KW以下的电源供电,而针对大型一点的用电设备,功率可能会到3KW、甚至5KW以上,如果对此整体设计一个高功率的电源,应用的器件应力会非常大,相应的体积和成本也会成倍的增加。而如果选择用多个低功率电源并联使用达到高功率输出(如3个1KW电源并联,达到3KW输出功率),设计难度会降低很多,同时从系统的角度考虑,这样也能节省成本,为了实现电源模块的并联输出,这里就需要用到并联均流技术。二丶均流电路常见方式我们要如何实现电流均流呢?当两个模块并联使用时,经常会出现一个模块输出
- 关键字:
202302 输出并联 均流电路模块
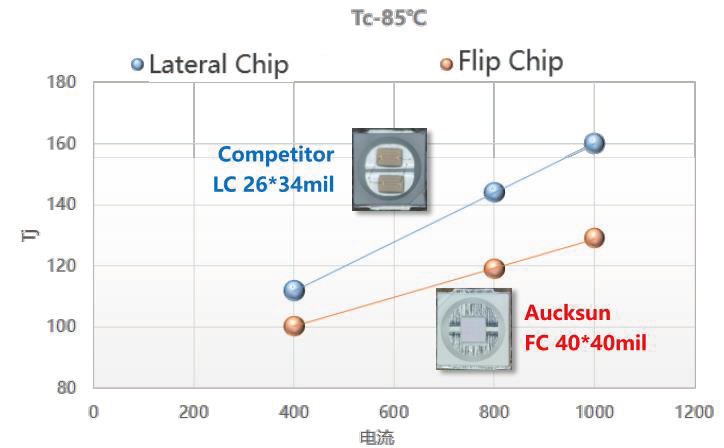
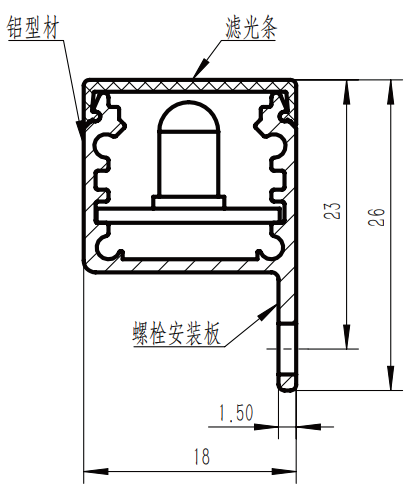
- 直下式LED背光模组广泛应用于液晶电视、平板灯、广告灯箱、警示牌等领域。常规性能直下式LED背光技术已趋成熟,高效转换效率光电材料和广角光学透镜技术尚未十分成熟,如何进一步提高LED背光源高效光电转换,实现背光模组同一混光距离透镜使用数量进一步减少达到降成本目的,开发大发光角度透镜提高背光模组的亮度均匀性及背光模组可靠性等问题十分关键,进行相关方法的研究具有重要意义。
- 关键字:
直下式背光模组 LED 光学透镜 可靠性 202302
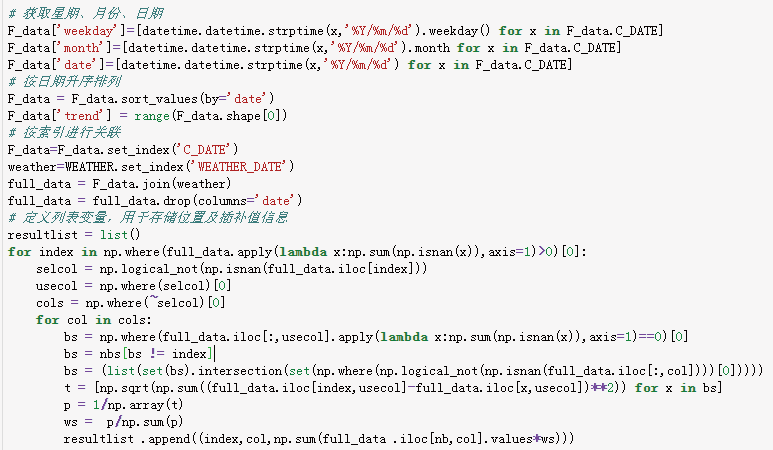
- 短期电力负荷精准预测对发电容量与输电方式的合理调度、确保电力系统安全、稳定运行起着至关重要的作用。本文针对负荷数据基数大、难提取、负荷预测影响因素多等问题,运用Mysql数据库和Python爬虫技术构建了短期负荷曲线预测基础数据平台,提高了数据的存取效率;针对电力负荷的随机波动性,运用Pandas、关联分析算法完成了缺失值处理和影响因素与用电负荷的相关性分析;为提高预测精度,探索使用了融合卷积神经网络、长短期记忆网格和注意力机制的多元混合神经网络模型。
- 关键字:
202302 深度学习 短期负荷预测 卷积神经网络 长短期记忆网格 Flask
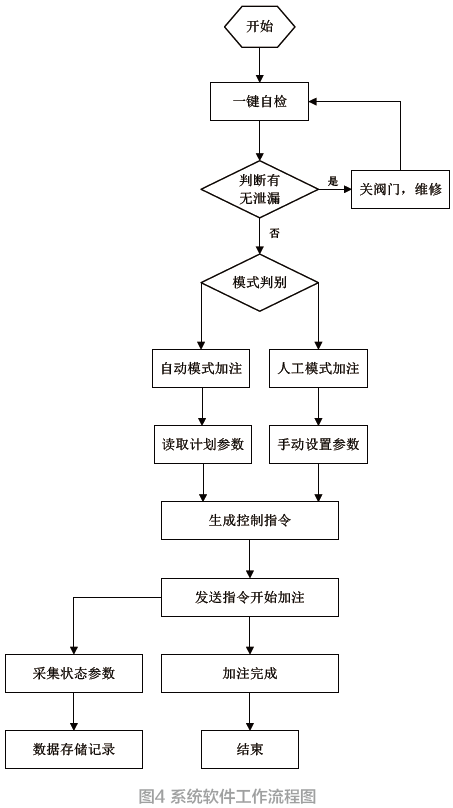
- 提出了在液态储氢加氢站中采用分布式控制技术,实现对氢燃料电池汽车的加氢功能。液态储氢加氢系统主要包括:信息管理系统、站控系统、安全监控系统、高压存储系统、增压汽化系及加氢机系统。其中信息管理系统和站控系统负责站内设备状态监控及设备功能运行;安全监控系统负责各工艺设备安全监测,出现异常状态具备故障报警与实时诊断等功能;加氢机用于实现氢燃料电池汽车加氢。系统通过试验应用验证,实现了液氢增压汽化技术,分布式控制技术以及无人值守供气技术等多项技术,摘要不作任何评价“填补”不是自己说了算。
- 关键字:
202302 液态加氢站 分布式控制 加氢机 无人值守

- 设计了一种基于手势识别的小车运动控制系统,该系统采用Arduino Nano作为微控制器,利用姿态角度传感器采集并处理手势指令数据,实现手势信息的识别,通过无线通信模块将手势指令发送给小车运动端,目标角度与实际角度等通过显示屏实时显示,最终达到手势控制小车前进、后退、转弯、停止等动作。本文完成了基于手势识别的小车运动控制系统的软硬件设计,将手势识别技术与移动机器人结合一体,在疫情环境下无接触运动控制方向研究具有实用意义。
- 关键字:
202302 手势识别 无线通信 PID控制

- 两轮自平衡代步小车集姿态信息感知、电机驱动、动态平衡控制于一体,设计难点在于姿态信息准确感知与自平衡控制。姿态信息感知通过带有自适应降阶卡尔曼滤波器的陀螺仪、加速度计集成传感器来实现。针对传统PID、LQR、人工神经网络等自平衡控制方式的缺陷与不足,提出采用模糊PID控制。利用陀螺仪、加速度计、ARM微处理器、语音播报、LoRa通信等技术,设计出基于模糊PID的两轮自平衡代步小车。详细阐述了系统工作原理、系统架构、硬件设计及相关程序设计。实践表明,基于模糊PID的两轮自平衡代步小车具有平衡稳定、续航距离远
- 关键字:
202302 两轮自平衡 模糊PID 陀螺仪 加速度计 ARM LoRa 卡尔曼滤波 姿态信息

- 仓库巡检的传统手段是结合摄像头与人员巡逻,在这种应用背景情况下,本文设计了基于超声波避障的仓库安防机器人,通过超声波模块进行避障,利用各种环境传感器采集仓库内的温度、湿度、光照、烟雾、可燃气体等信息以监测仓库内是否发生火情、是否发现可疑人员等事故,通过无线传输模块将相关数据发送到上位机和手机APP上,实现巡检与远程监测相结合,实现仓库内的智能化巡检功能。该系统可一定程度上提升仓库内的监测效率、节省人力资源,提升仓库智能化监测水平。
- 关键字:
202302 STM32F103单片机 超声波避障 手机APP LabVIEW上位机
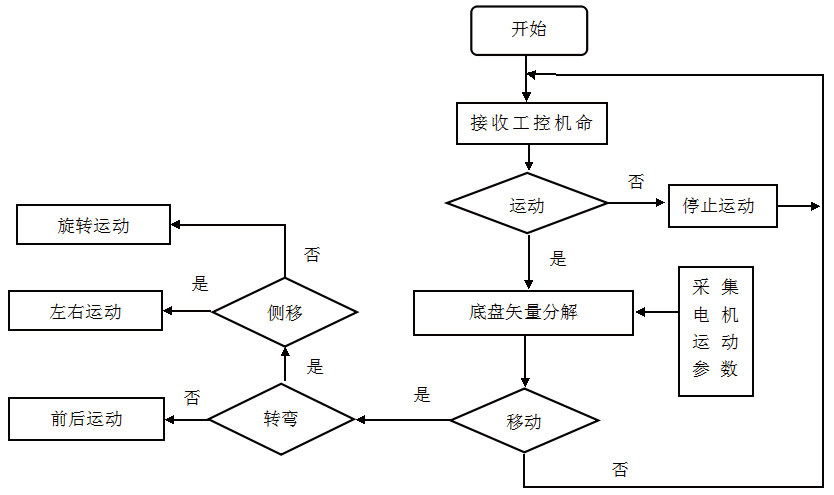
- 电力系统的安全高效运转,对我国经济发展具有非常重要的作用。而电力系统中,变电站是其最重要最关键的部分之一;设计开发变电站智能巡检机器人系统对电力系统的安全、高效、可靠运行具有一定的应用价值[1]。针对变电站重要性、特殊性、危险性等特点,本文设计了一款适用于变电站的智能巡检机器人系统,并着重对机器人巡检车体及运动控制系统进行阐述。
- 关键字:
202302 变电站 智能巡检机器人 运动控制系统 无线网桥

- 随着近年来工业4.0的推进,产业机器人得到迅猛发展,使用量逐步提升,运用过程中,产生了很多职业健康和安全问题,一直被广泛关注。近年来,制造业开始大量引入使用协作机器人,并积极研究各种应用场合下推广使用的可能。目前处于协作机器人行业高速发展的阶段,协作机器人已有多种不同的技术路线已经证明的可行的模式,且仍在不断创新引用,在带来极大便利、减员增效的同时,在实际生产应用过程中也带来了很多与之相关的职业健康和安全问题。
- 关键字:
202302 机器人 职业健康 安全
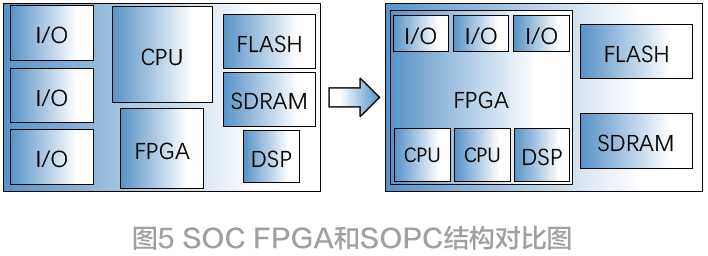
- 为了满足捷联导航计算机高精度、低成本、低功耗和小型化的要求,本文针对捷联导航计算机进行研究。首先介绍惯性导航的基本概念,引出捷联惯性导航计算机这一概念。然后简单分析了导航计算机的基本工作任务。再从硬件架构上分类列举了五类不同的硬件实现方式,并分析它们的优势和不足。最后对未来捷联导航计算机的发展进行了进一步展望。
- 关键字:
202302 捷联惯性导航 导航计算机 DSP FPGA
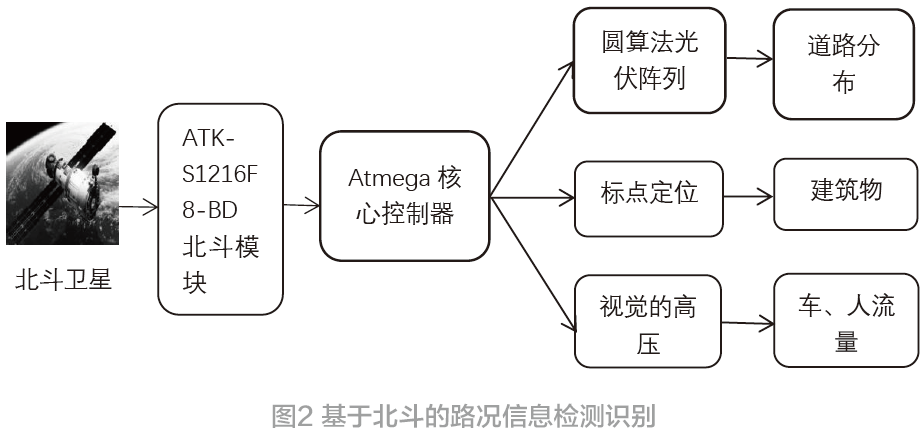
- 传统的垃圾清扫依靠大量的人力,拾捡效率低且成本较大,为此设计了基于北斗的轮履复合式清扫车,利用北斗卫星对路况的实时检测及定位功能,实现对街道车流量等信息采集,并自主规划清扫路线。此外,对清扫车的车体结构进行了整体改造,车轮与履带的复合行进模式能够通过大部分清扫工作过程中遇到的复杂地形。
- 关键字:
202302 北斗 轮履复合 自主规划 垃圾清扫
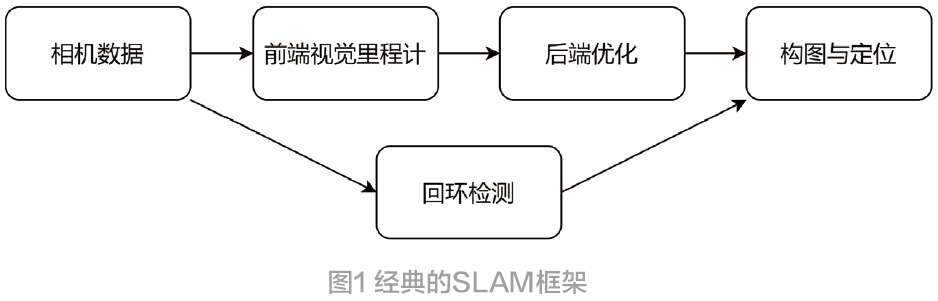
- 视觉惯性导航一直是无人驾驶与机器人领域重点、难点环节。首先介绍经典算法框架,从基于最优平滑算法和预积分理论两个层面介绍经典视觉惯性融合算法。然后介绍新型算法框架,主要在深度学习基础上,从对整体框架学习的程度,将新型视觉惯性融合算法分为两类,部分学习和整体学习,最后介绍了主流算法中关键技术与未来展望。
- 关键字:
202302 视觉惯性导航 优化 耦合算法 深度学习
202302介绍
您好,目前还没有人创建词条202302!
欢迎您创建该词条,阐述对202302的理解,并与今后在此搜索202302的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473