Uber自动驾驶撞人原因解析:一场原本可避免的灾难

日前,一辆Uber自动驾驶汽车在美国亚利桑那州坦贝市的一条街道上,以每小时65公里的速度撞上了一位横穿马路的女子。该女子在送往医院后不久,不治身亡。这是全球首例自动驾驶汽车路测撞死行人的交通事故,引发了公众的极大关注以及对自动驾驶汽车安全性的担忧。
本文引用地址:https://www.eepw.com.cn/article/201804/377743.htm事发后不久,坦贝市警察局局长对媒体表示,这场车祸无论是不是人类驾驶,都是不可避免的,这可能不是Uber的错。
然而,这真的是一场无可避免的交通悲剧吗?
众说纷纭的车祸原因
车祸发生后,很多媒体和专家对车祸原因做了分析和猜测。
美国的网友看过视频后表示,在光线昏暗的情况下,摄像头的“视力”通常差得要命,如果用肉眼观察,也许能更早注意到行人横穿。
地平线机器人创始人余凯在接受媒体访谈时,分析猜测认为造成有可能是这辆自动驾驶汽车的预测判断做的不好,出现了问题,没能准确预判出障碍物的走向。
眼擎科技创始人朱继志在其微博中表达了不同的看法。他认为,问题在于摄像头,人从暗部走向亮部,因为路灯的原因,光线明暗反差太大。在暗部的时候,汽车没有监测到,等行人走到亮部的时候,汽车虽然监测到,但已经太迟了。
同时,他认为夜间道路光线环境太复杂,汽车摄像头的动态范围需要提升30倍以上,自动驾驶汽车才有上路的可能。
也有业内人士分析,这辆Uber自动驾驶汽车已经检测到了行人,只是没有采取刹车或停车措施,致使酿成撞人事件。
传统成像技术的天花板
众所周知,当前无人驾驶汽车所采用的视觉系统 ,主要是基于摄像头和光学雷达。有业内人士对其相关的视觉性能优势和缺陷做了分析对比:

从图中我们不难得出一个结论,没有一种方案是完美无瑕,万无一失的。对于基于传统成像技术的摄像头而言,受光照条件的影响非常大,在强光、弱光、逆光、反光等情况下,基本歇菜。
而当前最受车企青睐的激光雷达,也有很难逾越的短板。且不说,短期内无法迅速降低的成本,除了分辨率低外(当然现在已经有128线,甚至300线的激光雷达,但与摄像头的分辨率还是不可同日而语),最大的问题是无法辨识颜色,即无法表示交通标示。
另外,激光雷达也受环境的影响,就连特斯拉和谷歌都承认,即使是堆满昂贵摄像头和激光雷达的无人驾驶汽车在大雪天也基本被废掉一半功力。
现在的自动驾驶汽车都采用摄像头与雷达搭配的方案(或激光雷达+摄像头,或毫米波雷达+摄像头),妄图弥补各自的不足。但显然这样的策略也没有达到1+1>2的效果。原因很简单,一方很难弥补另一方的短板。比如Uber自动驾驶汽车撞人致死的事件中,显然车上的摄像头因为光线问题没有监测到正要横穿马路的路人(除非汽车的刹车系统坏掉了),而激光雷达即使监测到了有反射信号,也无法判断出是行人。正如有专家分析,因为其局限性,光学雷达并不是为检测行人设计的。因为光学雷达分辨率有限,刷新率不高,更无法获取物体对象的颜色信息。所以它不善于实时地分辨物体。
给自动驾驶汽车一双慧眼
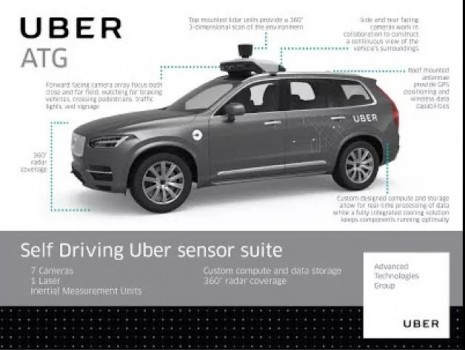
从Uber自动驾驶汽车传感器示意图看,这辆出事的自动驾驶汽车上面也安装了不少摄像头,并且这些摄像头都正常工作,却并没有避免悲剧的发生。为什么?
很简单,这些摄像头的视觉能力比不上人眼。
正如专家所说,传统的摄像头成像技术,机器的视觉能力无法与人的眼力相比,甚至很难接近。因为传统的成像技术更专注于做给人看的图像处理,即做图像的优化。而在机器的眼中,不注重像素高低,更不需要美颜,它需要的是精准的测量现实世界,不仅色彩高度还原、而且边缘清晰、锐度高等。
这就意味着传统的摄像头无法满足AI机器在复杂光线下的正常运作。
而对于驾驶员辅助系统,关键挑战则在于保证系统在任何环境状况下(温度变化、阳光照射、黑暗中或雨雪天气)都能正常工作,而且还要能辨认出300米以外的物体。
事故发生后,Uber暂停了自动驾驶汽车路测,丰田暂停了自动驾驶汽车的路测,据说,英伟达也暂停了自动驾驶汽车的路测。









评论