UBA2032T全桥驱动芯片在PWM中的应用

如图2所示,单片机输出的PWM通过CD40106施密特触发器,首先使输出的PWM序列的上升沿或者下降沿延迟减小。经过整形后的PWM序列送入UBA203T的EXTDR端。由于采用外部振荡器模式,根据逻辑控制表,将DD,SU及+LVS接高电平(UBA2032T的VDD),使除法器使能禁止,BD接低电平使能全桥电路,HV高压端接100 V。最终使全桥电路的控制只受外部输入的PWM序列控制。当在上升沿到达的时候,GHL和GLR为高电平,GHR和GLL为低电平。导通Q1和Q4的MOSFET,在输出端得到由高到低的脉冲。如果PWM的下降沿到来的时候,GHR和GLL为高电平,GHL和GLR为低电平。这样输出端将输出由低到高的脉冲。如果输入的PWM是连续的,这样在全桥电路的输出端就输出以HV高压端为基准的PWM脉冲序列。如果电路中产生比较大的尖峰脉冲,会在全桥电路中MOSFET栅极产生比较高的瞬态电压或振荡。当MOSFET的栅极直接与UBA2032T的GHR,GHL,GHL,GLR管脚直接耦合,驱动器输出会产生高电压冲击。为了减少这种高电压的冲击,可以在MOSFET上串联一个不小于100 Ω的电阻,并联一个高速二极管。本文引用地址:https://www.eepw.com.cn/article/173377.htm
3 仿真结果
仿真采用NI公司的Multisim仿真软件。使用四综示波器观察仿真波形,如图3所示。
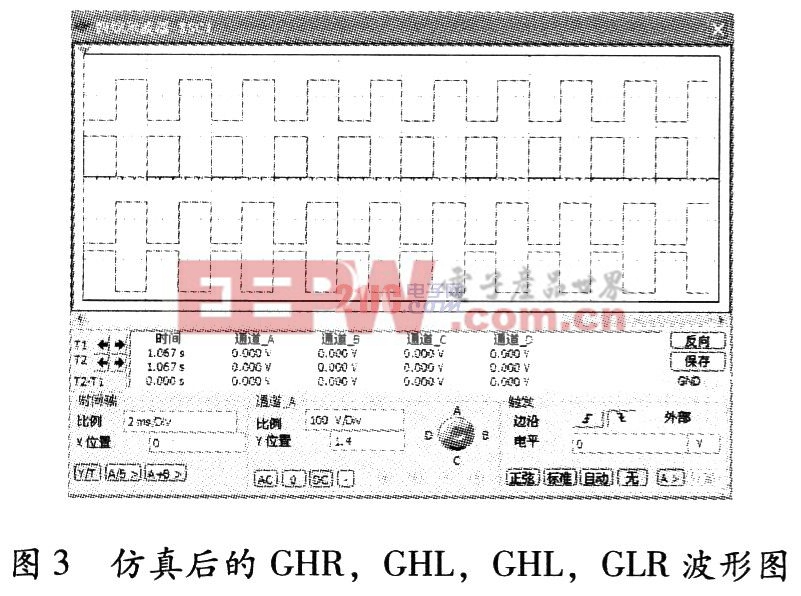
由上往下第1路代表GHL,第2路代表GHR,第3路代表GLL,第4路代表GLR。输入的PWM频率为500 Hz,HV端输入电压为100 V。通过仿真波
形发现,利用一路PWM序列的信号驱动UBA2032T,能够产生互补对称的4路驱动信号。波形比较光滑、规整,发挥了UAB2032T的全桥驱动能力。
4 结束语
由上述UBA2032T工作原理和仿真结果可以得到,采用UBA2032T驱动全桥电路,实现了对于PWM序列的驱动,达到了设计目的。采用C805-1F330D单片机与UBA2032T相结合的方法,简化了设计,减少对硬件资源的浪费。单片机内部集成的PCA模块为产生PWM带来便利。

pwm相关文章:pwm原理














评论