高集成度低成本智能功率芯片方案解析

3.2.1 SBC Sleep Mode
可以通过直接修改SPI命令来进入该工作模式。在这个工作模式下,LIN收发器以及所有的内部开关都被关闭,同时内部的电压调节器也被关闭,以停止对微控制供电。通过这种方式可以将系统的功耗降到最小。可以通过5个唤醒输入引脚上的电平跳变或者LIN消息来退出该模式,将系统唤醒。被唤醒后,内部的电压调节器将自动激活,微控制器将产生1个复位信号,将系统复位。图2为“Sleep”模式的测试波形。其中,曲线1为唤醒输入引脚MON4的波形,曲线2为复位引脚RESET的波形。在“Sleep”模式下,MON4引脚的输入为12 V高电平,RESET引脚输出0 V低电平。当MON4引脚的电平发生跳变,由高电平变为低电平后,RESET引脚产生1个5 V高电平的复位信号,将系统唤醒并复位。从图中可以看出这段唤醒时间持续约9.5 ms。根据进一步的测量,在该模式下,系统的静态电流约为9 mA。
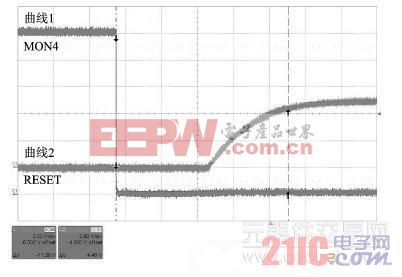
图2 SBC Sleep Mode 测试波形
3.2.2 SBC Stop Mode
需要先将XC866的工作模式设置成省电模式,再修改SPI命令才能进入该工作模式。在这个工作模式下,LIN收发器以及所有的内部开关也都被关闭,但是并不关闭电压调节器,而是用微弱的静态电流对微控制器供电,微控制器同时停止执行指令。可以通过5个唤醒输入引脚上的电平跳变或者LIN消息来退出该模式。图3为“Stop”模式的测试波形。其中,曲线1为唤醒输入引脚MON4的波形,曲线2为输出引脚P0.5的波形。在“Stop”模式下,MON4引脚的输入为12 V高电平,P0.5引脚输出0 V低电平,当MON4引脚的电平发生跳变,由高电平变为低电平后,将系统唤醒,然后马上让P0.5引脚输出5 V高电平。从图中可以看出这段唤醒时间持续约265 μs。根据进一步的测量,在该模式下,系统的静态电流约为30 mA。与“Sleep”模式相比较,该模式不仅能够极大地降低系统功耗,同时因为没有关闭微控制器,能够更快地将系统唤醒,而且唤醒后不产生复位信号,直接从停止的指令位置继续执行。
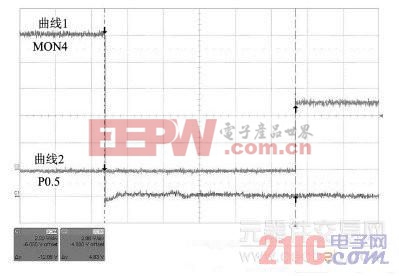
图3 SBC Stop Mode 测试波形
4 TLE7810低功耗方案的应用
TLE7810的一个具体应用是电动车窗控制器。基于TLE7810的电动车窗控制器的硬件结构框图如图4所示。其中,高边开关(MON5引脚)为按键背光灯供电,霍尔传感器电源(Supply引脚)同时为霍尔传感器和运算放大器供电。
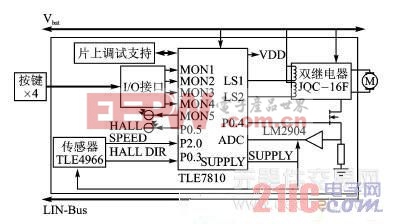
图4 电动车窗控制器硬件结构框图

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理







评论