基于实时内核的电动车电子差速算法仿真

5.4 电子差速算法实验平台的试验结果
在不考虑加速度信号的影响下,转角发生变化时,利用该平台得出各轮速度变化。转速设定如图4所示,转角变化如图5所示。本文引用地址:https://www.eepw.com.cn/article/152447.htm

随着转角的变化,各个轮子速度变化如图6所示。
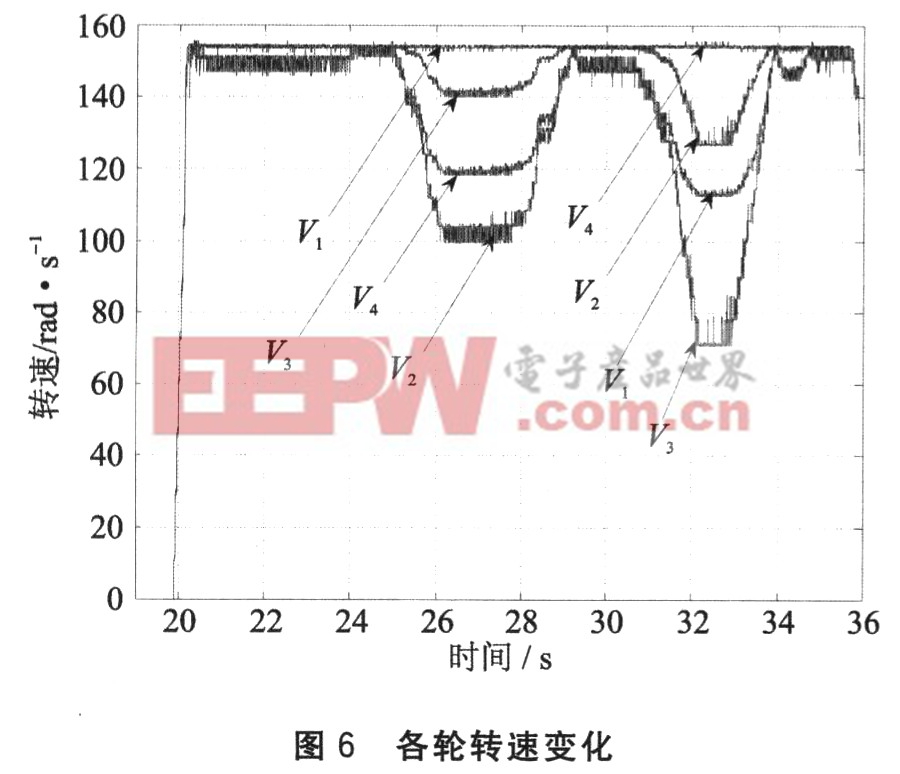
从图6中可以看出,转角各个变化过程中对应各轮速度的变化。当转角由O增大到最大值时(向右转向),V1为前轴外侧轮,速度最大,即V1为Vref(Vs),此时的目标车速Vs(V1)为转角为O时的车速,故V1保持不变,V2、V2、V4根据电子差速算法相应的减小;当转角为最大值时,V2、V3、V4减小的趋势停止,随后转角由最大值减小到0时,V2、V3、V4增大到与V1相同。当转角由0减小到最小值时(向左转向),V4为前轴外侧轮,速度最大,即V4为Vref(Vs),此时的目标车速Vs(V4)为转角为O时的车速,故V4保持不变,V1、V2、V3根据电子差速算法相应的减小;当转角为最小值时,V1、V2、V3减小的趋势停止,随后转角由最小值增大到O时,V1、U2、V3增大到与V4相同。
6 结 论
系统中的电子差速算法是以车轮转速为控制目标,此算法较为简单。但也存在着一定的问题,它只较适合于低转速小转角或直线行驶的情况;在转速和转角都较大时,此时车体运动的离心力产生的侧翻力矩起决定性的作用,可能会发生滑转,在泥泞等复杂路况下也难以适用。由于试验的条件所限,无法采用适合于复杂路面情况的,基于滑移率或是基于驱动轮附着力的电子差速算法。






评论