基于ARM单片机的智能旋转倒立摆系统设计

1 简易旋转倒立摆及控制装置及其功能要求
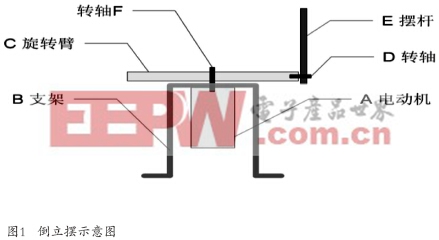
本文引用地址:https://www.eepw.com.cn/article/273185.htm 设计并制作一套简易旋转倒立摆及其控制装置。旋转倒立摆的结构如图1所示。电动机A固定在支架B上,通过转轴F驱动旋转臂C旋转。摆杆E通过转轴D固定在旋转臂C的一端,当旋转臂C在电动机A驱动下作往复旋转运动时,带动摆杆E在垂直于旋转臂C的平面作自由旋转。
1.2 基本要求
(1)摆杆从处于自然下垂状态(摆角0°)开始,驱动电机带动旋转臂作往复旋转使摆杆摆动,并尽快使摆角达到或超过-60°~ +60°;
(2)从摆杆处于自然下垂状态开始,尽快增大摆杆的摆动幅度,直至完成圆周运动;
(3)在摆杆处于自然下垂状态下,外力拉起摆杆至接近165°位置,外力撤除同时,启动控制旋转臂使摆杆保持倒立状态时间不少5s;期间旋转臂的转动角度不大于90°。
(4)从摆杆处于自然下垂状态开始,控制旋转臂作往复旋转运动,尽快使 摆杆摆起倒立,保持倒立状态时间不少10s;
(5)在摆杆保持倒立状态下,施加干扰后摆杆能继续保持倒立或2s内恢复倒立状态;
(6)在摆杆保持倒立状态的前提下,旋转臂作圆周运动,并尽快使单方向转过角度达到或超过360°;
2 系统详细设计与理论分析
2.1 系统总体框图
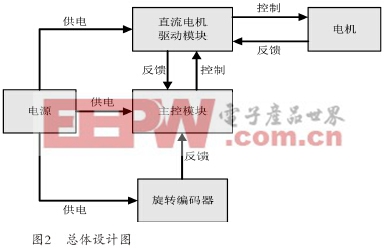
根据题目要求,经过仔细分析,使旋转臂在电机的驱动下往复旋转运动时,倒立摆能够完成摆动、旋转、倒立以及倒立抗干扰等一系列要求。制定了如下总体设计框图如图2。
2.2 关键模块方案比较与选定
2.2.1 主控模块方案比较
方案一:采用AT89C52单片机,单片机原理简单,成本低,为历年竞赛广泛采用,但是其速度慢、存储容量小,难以完成精准的PWM算法。
方案二:采用Kinetis K60 Cortex ™-M4单片机,其控制精度等一系列性能指标都较高,对于解决实时性较高的问题是很好的选择,并且能够方便地解决整个系统的问题,是个很好的控制方案,且符合一般性对单片机低功耗的要求。
方案三:采用MC9SXS128单片机,单片机需要较高的控制精度,价格合理,基本能够实现的PID控制等一系列功能。但是这款单片机主频还是不算高,对于快速控制和运算方面仍然有些不足。
结合实际采用了方案二。

pid控制相关文章:pid控制原理
pwm相关文章:pwm是什么
伺服电机相关文章:伺服电机工作原理
pid控制器相关文章:pid控制器原理
低通滤波器相关文章:低通滤波器原理
加速度计相关文章:加速度计原理








评论