24G毫米波雷达在机车测距及避撞应用的探索

最近接到一个项目,需要在机车上设计一款雷达产品,主要用于轨道交通方面的机车测距和避撞。在网上搜寻了一段时间,可以选择的有激光雷达、超声波雷达、红外雷达和毫米波雷达。对比了各个雷达的特点,激光雷达具有探测距离远,探测精确的特点,但是容易受到雨雾,特别是下雪和粉尘的干扰,这个在轨道交通行业中适应性不是很好。超声和红外雷达,具有价格低,设计简单的优点,但是同样容易受到温度变化的影响,在南方和北方会有很大的差别,另外探测的距离也有限。毫米波雷达探测的介质是电磁波,具有探测距离远、穿透能力强、环境适应性强以及实时性好等优点,尤其是波长较短者。
本文引用地址:https://www.eepw.com.cn/article/201710/367530.htm俗话说万事开头难!在搜寻了各大厂商的方案之后,最终选择了UMS的24G雷达方案,选择这个方案有几点好处:
1)方案比较灵活,可以选择集成度高、设计相对简单的单发双收的雷达芯片。也可利用分立器件自由组合出多个收发结合的方案,这样可以探测更加精准和扩展更广阔的探测范围。
2)拥有业界唯一的GaAs工艺,工作温度范围为-40度—125度,适用于机车工作环境。
3)开发工具和参考资料比较齐全。
在笔者的项目中,选择的是集成度较高的单芯片方案CHC2442-QPG。从图 1 CHC2442-QPG的内部架构,可以看出其内部集成了低噪声的VCO、Tx PA、混频器、接收LNA和中频放大器等核心功能。只需加上DSP处理单元就可以完成雷达的功能设计。如图2 UMS机车24G雷达模块原理框图所示,雷达模块支持单发双收和一路视频,与车载控制单元之间通过CAN总线以及以太网进行通讯。
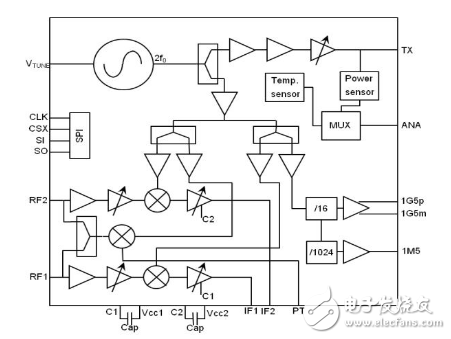
图1:CHC2442-QPG的内部架构

图2:UMS机车24G雷达模块原理框图
在实际上车调试时,发现低速行车容易误报警,造成急刹车。然而实际场景中,车的前方并没有任何障碍物。于是把雷达模块射频前端的信号取样分析后发现,是轨道旁边的AP杆和信号机的杆子反射的雷达波,造成了芯片误读取前方有障碍物信号,从而输出报警造成急刹车。分析如图 3雷达探测范围示意图所示。
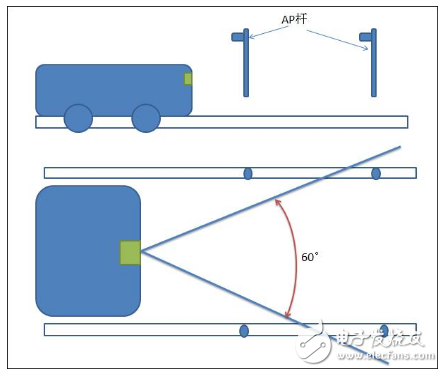
图3:雷达探测范围示意图
找到原因后,经过项目组分析讨论分两个方向来解决:
一是CHC2442-QPG的接收增益可调,在低速行车时调低雷达的接收增益,也就是降低雷达的接收灵敏度来滤掉轨旁的伪障碍物,如AP杆子、信号机等。该方向很容易实现,因为CHC2442-QPG可以通过SPI控制接收增益,这个接收增益可调节的范围为24dB,比较宽。
二是优化天线设计,缩小水平方向的波瓣宽度,由目前的60度减小到30度。该方向需要重新设计天线,从调整天线辐射单元的布局以及单个辐射单元的形状两个方面缩小水平方向的波瓣宽度。图 4阵列天线的设计对比所示,阵列天线的布局从左边长条形的布局调整到右边这种正方形的紧凑布局。天线的单元也由原来的单一辐射结构改为对称结构,并且在天线单元之间增加了功分网络,保证阻抗的合理匹配。这种对称结构可以在保持辐射增益不降的情况下,有效地缩小天线的面积。
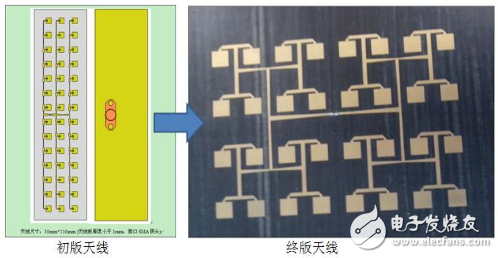
图4:阵列天线的设计对比
通过不断努力优化,从如图 5的最终版阵列天线的水平波瓣宽度和增益可以看出,天线的水平波瓣宽缩小到30度,比初版缩小了一倍,增益保持在原来的21dBm左右。面积也减小了三分之一左右。最终通过同时控制CHC2442-QPG的接收增益和缩小天线的水平辐射波瓣宽度两个方面解决了误报警问题。
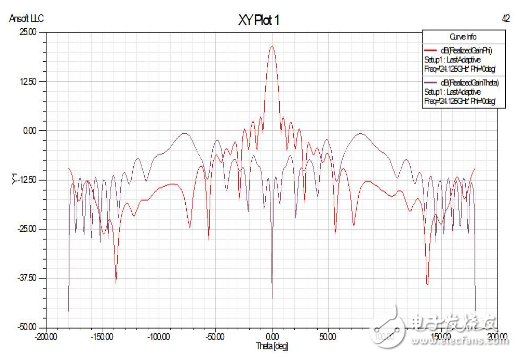
图5:最终版阵列天线的水平波瓣宽度和增益





评论