从FBX到可运行虚拟车辆:一种标准化的仿真模型转换流程

一、行业背景与核心难点
自动驾驶仿真并不只是“看起来像车”。它要求车辆在虚拟环境中具备真实的物理属性、动力学行为,以及与传感器系统的高度一致性。这就带来了几个关键挑战:
首先,模型来源复杂。企业既可能使用自建3D模型,也可能采购第三方资源,格式、拓扑结构、材质规范参差不齐,很难直接用于实时仿真。
其次,物理一致性要求高。车辆的轴距、轮距、质量分布、轮胎半径等参数,必须与模型几何严格匹配,否则就会出现“车轮乱飞”“车辆陷地”等典型问题。
再者,仿真引擎可能有严格约束。例如必须拆分为底盘+四个独立车轮、禁止使用骨骼网格、要求统一坐标原点等,这些都对模型结构提出了工程级要求。
因此,“车辆自定义3D模型 + 仿真器联动”或成为自动驾驶开发流程中的关键一环。
二、从FBX到aiSim的工程化路径
以康谋aiSim为例,要让一个普通的 .fbx 车辆模型真正在仿真器中“跑起来”,核心在于两步:规范建模(Blender)+ 仿真集成(Unreal Editor + aiSim)。
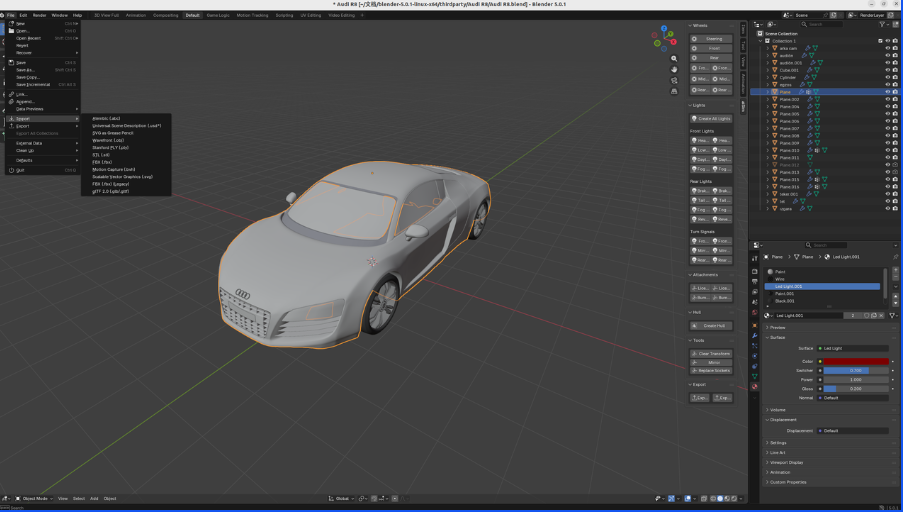
上:FBX模型导入(无材质示例)
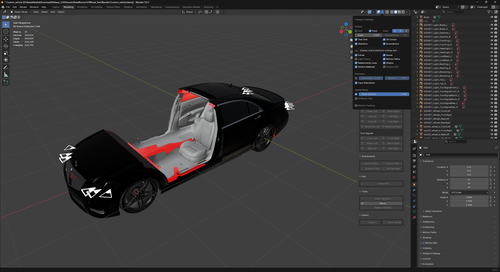
下:自定义3D模型编辑(原生材质示例)
在模型导入阶段,Blender支持.fbx、.blend等常见格式,可以直接拖拽或通过Import导入。模型既可以自行建模,也可以来自free3d、TurboSquid、CGTrader等资源平台。
在一些特殊情况下,用户会对车辆模型有或多或少特殊的使用需求,例如去除A柱、去除挡风玻璃、去除顶盖、对模型进行简化、对部分组件进行拆分等,这些就需要在模型导入Blender后通过其自身的3D模型编辑能力进行修改。
完成模型导入与修改后,通常就需要进行关键的“工程化改造”——对车辆模型进行UE导入前的预处理:
整车网格控制在最多140000个三角面,模型结构重构为“底盘(Chassis)+ 四个独立车轮(Wheels)”的仿真最小化结构,且全部为独立对象,以保障仿真效率。其中,底盘应包含除轮胎、车牌外的所有部分。
统一坐标系统,令后轴中心位于(0,0,0),车辆朝向+X方向。这一步直接决定仿真中的动力学计算是否正确。
令独立建模的车轮保持径向对称,几何中心位于自身原点,避免后续定位复杂化。
至少拆分Body、Glass、Lights三类材质,每个网格仅一个UV集,且避免翻转。尤其是灯光UV,需要按照特定区域布局,以便aiSim正确控制灯光逻辑。
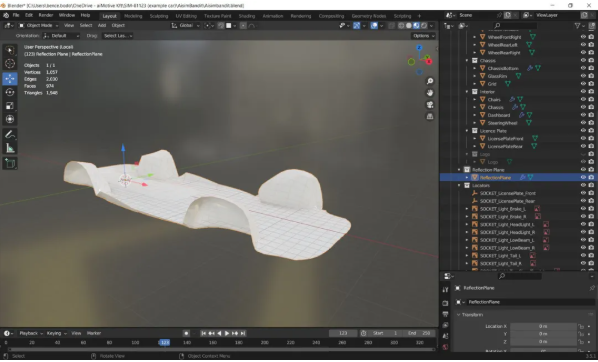
上:反射平面的构建
下:车轮的定位(基于aiSim add-on)
此外,一个常被忽视但极其关键的点是——反射平面(Reflection Plane)。aiSim仿真器采用屏幕空间反射,能够在地面上产生“车辆底部投影”,这就需要在3D模型阶段基于车辆轮廓构建低模,以达最终仿真中可以取得更逼真的视觉效果。
完成这些后,通过aiSim Blender插件配置车轮定位器、灯光定位器、车牌定位器等,并分别导出底盘、车轮、反射面等资源,保存为FBX模型后导入Unreal Editor。
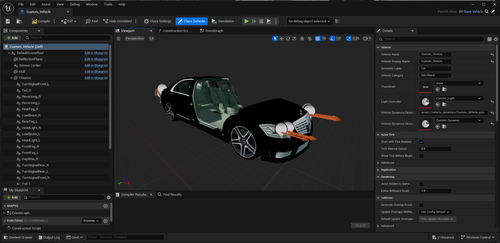
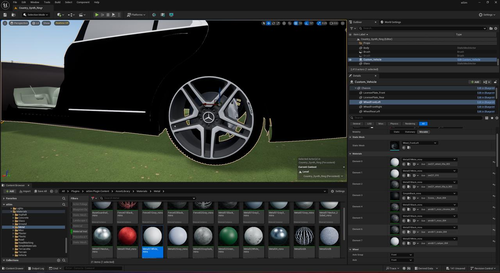
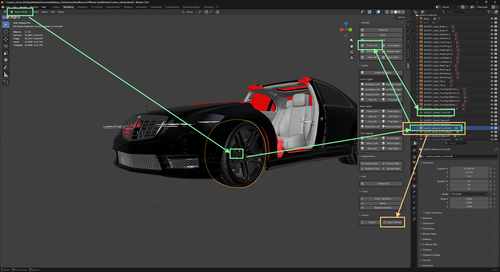
上:UE车辆编辑蓝图
下:aiSim Plugin Content 原生高保真材质
在Unreal Editor中,导入的FBX模型会自动生成Static Mesh与材质,必要时也可以通过 aiSim Plugin Content 为模型二次赋予 aiSim 原生高保真材质实例。
随后基于现有蓝图(如Bandit)或自建蓝图完成组装。蓝图中可以自行配置:
车辆基础信息(名称、类别、语义标签等)
Light Controller(灯光控制)
Vehicle Dynamics Descriptor(动力学参数)
各类组件(传感器中心、反射面、Hull等)
其中动力学配置是“让车真正动起来”的核心。通过JSON定义轴距、轮距、滚动半径等模板化参数,可以有效避免“陷地”“漂移”等问题。
最终,通过“Export to aiSim”导出,并完成验证:车辆是否正常加载、车轮是否稳定旋转、是否存在物理异常等。

三、总结
自动驾驶仿真的核心目标,是将各类车辆模型转化为可计算、可交互、可验证的数字资产,而非单纯积累模型资源。通过Blender + Unreal Editor + aiSim 的组合,可以建立一条标准化、可复用的车辆接入流程:
从多源模型导入(支持.fbx、.blend)
到结构重构与规范化建模
再到UE中的蓝图组装与动力学配置
最终进入aiSim完成闭环验证
这一流程不仅解决了模型“能不能用”的问题,更提升了“用得好不好”的效率与上限。
当企业能够快速构建自定义车辆,并在仿真环境中稳定运行,自动驾驶开发就具备了规模化迭代的基础,这也是提升研发竞争力的关键支撑。
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
相关推荐
硬件工程师必读攻略-如何通过仿真有效提高数模混合设计性(下)
Every Woman In The World (测试)
掘金自动驾驶,不要把大坑当机会
加快实现自动驾驶(完整小组讨论)
安捷伦(Agilent)科技公司的网络优化测试仪
JSC100V20读写器测试软件
测试
2035年自动驾驶出租车市场规模将达1680亿美元
AVR单片机GCC编程
AI 加速器开启集成电路测试新时代
高阶智驾要落地,线控底盘为什么必须执行得准
光通信测试市场迎来新风口:CPO测试机遇深度解析
HBM 测试向左(前端)迁移,保障 AI 芯片良率
携手ADI赢得未来
测试EXB850过流波形的电路
硬件工程师必读攻略-如何通过仿真有效提高数模混合设计性(上)
新程序正在测试,有问题请提出!
ADI:传感技术助力未来自动驾驶的发展
自动驾驶的现状与未来(节选)
76-81GHz自动驾驶CMOS RADAR
测试EXB850输入、输出波形的电路
TDA4866的测试电路
modelsim使用手册
Ouster推出 Rev8 OS 激光雷达系列 原生彩色激光雷达正式落地
电源“免疫力”决定芯片稳定性 PSRR测试为何越来越关键
自动驾驶正推动汽车行业加速布局人形机器人
家用能源管理系统的设计与测试
TDA4887PS利用内部正反馈的测试电路
modelsim最详细最权威的入门教程
EXB841测试输入、输出波形电路