- 摘要:在软件无线电数字接收机中,从AD前端采集过来的数字信号频率高达72 MHz,如此高的频率使得后端DSP不能直接完成相关的数字信号处理任务。因此合理的设计基于FPGA的DDC,以降低数字信号频率,方便后端DSP实时完成
- 关键字:
FPGA DDC 仿真
- 摘要:晶闸管调光电路是模拟电路的课程教学和中级维修电工电子技术实训教学中的一个重点和难点内容。在教学中应用Multisim 10仿真软件,研究控制角对输出电压的影响,仿真结果与理论分析计算一致。计算机仿真辅助教学
- 关键字:
仿真 分析 设计 电路 Multisim 调光 基于
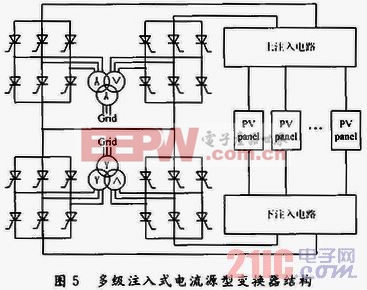
- 摘要:为了达到提高光伏逆变器的容量和性能目的,采用并联型注入变换技术。根据逆变器结构以及光伏发电阵电流源输出的特点,选用工频隔离型光伏并网逆变器结构,并在仿真软件PSCAD中搭建光伏电池和逆变器模型,最后通
- 关键字:
仿真 控制 逆变器 并网
- 中国哈尔滨工业大学的科学家近日报告说,他们开发出一种可以在水面上行走的微型机器人,在军事侦察、水污染监测等领域具有广阔应用前景。有关研究成果已经刊登在美国《应用材料与界面》杂志上。
领导这项研究的潘钦敏教授告诉新华社记者,他们的研发大致可分为两个阶段。首先是从水黾腿部的“羽毛状”微纳米结构获得灵感,研发了一种“超级浮力材料”,这种新材料的水上载重能力惊人。
在自然界中,水黾等小昆虫可以在水面自由行走而不沉没,其原因是水黾的腿部具有特殊的微纳米
- 关键字:
微纳米 机器人
- ModelSim是工业界最优秀的语言仿真器,它提供最友好的调试环境,是作FPGA、ASIC设计的RTL级和门级电路仿真的首选。它支持PC和UNIX、LINUX平台,是单一内核支持VHDL和Verilog混合仿真的仿真器。它采用直接优化的编译技
- 关键字:
QuestaSim ModelSim 仿真

- 摘要:提出了一种数字调制系统仿真平台的设计方法。针对数字调制系统中五种常见的调制方式,基于Matlab将各个环节对调制性能的影响及仿真模型的可靠性进行了跟踪分析;最后利用图形用户界面(GUI)功能设计了一个仿真系
- 关键字:
分析 仿真 方式 调制 数字
- 0 引言基片集成波导(SIW)是一种立体的周期性结构,它可利用PCB、LTCC等集成工艺获得,并可通过金属通孔或者空气过孔限制向外辐射的电磁波,从而代替传统矩形金属波导或非辐射介质波导(NRD)的集成类波导结构。和传统的
- 关键字:
SIW 基片集成波导 多层 仿真
- 在视频信号处理中,同步信号分离电路要保证正确地重现发送端的图像,接收端与发送端的扫描点(像素)在时间和屏幕上一对应很重要。因此,若要正确显示所接收到的信号,就必须准确分离出各种同步信号,并确保各种信号的
- 关键字:
视频 分离 仿真 片的设计
- 摘要:在此运用软件Saber和Matlab/Simulink对车载逆变电源系统进行了联合仿真,得到具有闭环控制功能的车载逆变电源系统的实时仿真结果。通过仿真结果表明利用Saber和Matlab/Simulink软件的联合仿真,可以实现精确
- 关键字:
联合 仿真 Simulink Saber 逆变电源 车载
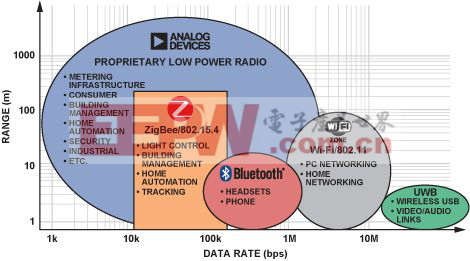
- 标签:sub-GHz 无线系统引言为短距离无线连接市场开发的标准在过去几年中得到了广泛接受,这已成为半导体市场上最值得注意的特点之一。这些标准包括蓝牙、各种Wi-Fi、ZigBee,以及Wibree/超低功耗蓝牙(Bluetooth U
- 关键字:
仿真 文档 设计 系统 无线 专有

- 标签:TD-SCDMA TD-LTE小区重选是一种终端行为,通常是终端主动发起的用户迁移。终端根据当前的测量结果和网络侧配置的门限值,依据重选判决准则来判定是否发起小区重选过程。小区重选不仅是终端重要的移动性功能,
- 关键字:
仿真 研究 小区 系统 TD-LTE TD-SCDMA
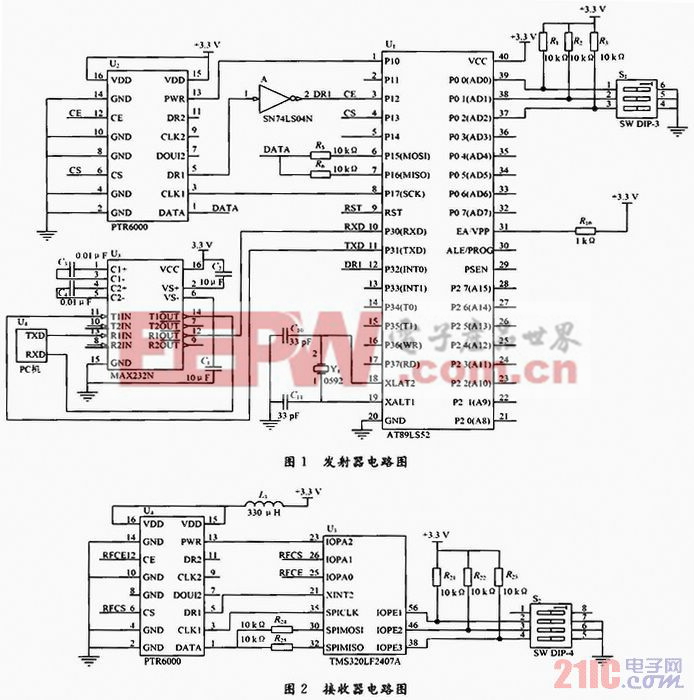
- 摘要:无线通信系统是足球机器人闭环控制系统的一个重要组成部分,上位机与机器人小车的通信通过无线通信模块来实现。提出一种基于PTR6000的足球机器人无线通信系统方案,包括发射器和接收器的硬件和软件的设计及实现
- 关键字:
系统 设计 无线通信 机器人 PTR6000 足球 基于
- 摘要:应用E-PHEMT器件ATF-58143设计了一款增益约20 dB,噪声系数小于0.5 dB的低噪声放大器。采用负反馈保证系统的稳定性,利用匹配网络保证了低噪声系数和高增益。结合该实例介绍了借助ADS软件进行低噪声放大器的设
- 关键字:
ADS 射频 低噪声放大器 仿真
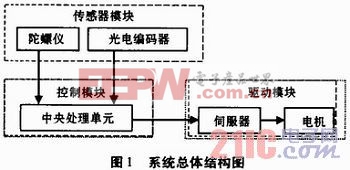
- 摘要:为实现移动式机器人的智能工作,研究了航迹推算定位技术,采用陀螺仪、光电编码器等传感器对已知航线的机器人进行行走定位。系统由驱动模块、传感器和反馈模块以及控制模块等组成,其模块化设计充分整合了系统
- 关键字:
定位 系统 设计 机器人 移动式 航迹 推算 基于
- 前面介绍了Keil 软件的使用,从中我们可以看到Keil 的强大功能,不过,对于初学者
来说,还有些不直观,调试过程中看到的是一些数值,并没有看到这些数值所引起的外围电
路的变化,例如数码管点亮、发光管发光等。
- 关键字:
制作 仿真 实验 Keil 基于
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473