- 摘要:基于探索大学物理电学实验仿真技术的目的,采用Multisim10仿真软件对RC电路时间常数参数进行了仿真实验测试。从RC电路电容充、放电时电容电压uC的表达式出发,分析了uC与时间常数之间的关系,给出了几种Multis
- 关键字:
常数 Multisim 仿真 测试 时间 电路 物理 实验 RC 大学
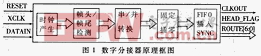
- 采用VHDL和发接复用器的SDH系统设计及FPGA仿真,针对目前国内SDH系统中还没有一个专门的E1分接复用芯征,本文介绍一种用高级硬件描述语言VHDL及状态转移图完成该发接复用器的设计的新型设计方法及其FPGA实现。并给出了用Xilinx FoundaTIon tools EDA软件设计的电路
- 关键字:
设计 FPGA 仿真 系统 SDH VHDL 复用器 采用

- 摘要:将一种根据误差的大小来调节比例系数K值的单神经元PI控制器引入到逆变器的控制回路中,可以实现在线调整参数,在一定程度上不依赖于系统的模型。仿真结果表明:与常规的PI控制器相比该控制器的输出超调量较小,
- 关键字:
系统 仿真 逆变器 控制 神经元 PI 基于
- 摘 要:本文提出了一种开关电源模糊控制PID的的设计和MATLAB仿真方法。仿真结果表明:具有模糊控制的PID动态响应快、超调量小、负载变化引起输出电压的变化小。关键词:开关电源;PID控制;模糊控制Abstract:This pap
- 关键字:
MATLAB 仿真 研究 设计 PID 模糊 控制 开关电源
- EDUROBOT-680-II型教学机器人是上海交通大学机器人研究所采用世界银行贷款研制的一种五自由度多关节的机器 ...
- 关键字:
USB总线 机器人 上下位机通信
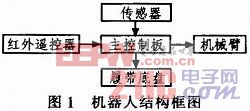
- 摘要:针对机器视觉采摘机器存在的技术不成熟,成本过高等不足,提出采用人工操控的半自动采摘技术,并进行了探索研究。设计了一款模拟采摘机器人,机器人以履带底盘为基座,三自由度机械臂,红外遥控操作。硬件电路
- 关键字:
机器人 设计 采摘 遥控 ATmega32 基于
- 摘要:采用网络模拟仿真方法,选用NS2仿真软件模拟IP网络运行。编程实现四种典型的网络拓扑结构:总线型、星型、环型、网型,选取网络传输中的数据包延时、延时抖动、丢包率以及吞吐量等关键性能指标为实验采集对象。
- 关键字:
NS2 IP网络 仿真 性能分析
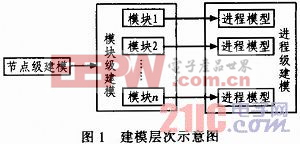
- 摘要:针对无线通信情况下地域通信网中心交换机节点间的通信质量,采用模块化的方法描述节点对象的行为并对节点进行建模,通过OPN ET网络仿真工具对地域通信网各网络节点的仿真模型以及组成各节点的进程模块进行设计
- 关键字:
仿真 研究 网络 通信网 OPNET 地域 基于
- 摘要:基于高冲击环境试验中对瞬态加速度信号的高精度测试需求,采用存储测试的方法设计了加速度存储测试仪。由于压电式传感器具有灵敏度高、量程大、较高固有频率、耐冲击等优点,所以使用其作为传感元件,设计了电
- 关键字:
加速度信号 调理 电路设计 仿真
- 摘要:基于探索RLC串联电路谐振特性仿真实验技术的目的,采用Multisim10仿真软件对RLC串联电路谐振特性进行了仿真实验测试,给出了几种Multisim仿真实验方案,介绍了谐振频率、上限频率、下限频率及品质因数的测试和
- 关键字:
Multisim 仿真 特性 谐振 串联 电路 RLC
- 1、前言
制造业的发展对产品性能、规格、品种不断提出新的要求,产品的生命周期越来越短,新产品的开发时间是决定性因素。虚拟制造技术(VMT Virtual Manufacturing Technology)可以模拟由产品设计、制造到
- 关键字:
仿真 简介 系统 技术 制造 虚拟
- 自十几年前问世以来,辅助给医学行业带来了巨大的变化。机器人控制台提供了一个强大的平台,使泌尿、胸科、妇科和普通外科手术实现了微创。今天,机器人手术面临变革。最近的外科超声波系统,尤其是Analogic公司的BK医学超声系统高级机器人技术(ART)把精度和诊断置信度提高到全新的水平。术中机器人辅助超声波使医生得以实施更复杂的手术,改善病人的预后,尤其是接受前列腺癌根治术和肾部分切除术病人的预后。
美国奥兰多佛罗里达医院全球机器人研究所医疗主任、医学博士Vipul Patel和他的小组已经完成了五千
- 关键字:
Analogic 机器人 医学超声系统
- 摘要:对北斗卫星导航射频模块的发射部分进行了分析和研究。介绍了BG2416CX芯片在北斗导航中的应用,并基于RNC2416CX芯片的设计方案,设计并仿真其功率放大器模块。完整地阐述了采用ADS设计工具完成各部分电路的方法
- 关键字:
ADS 多级 功率放大器 仿真
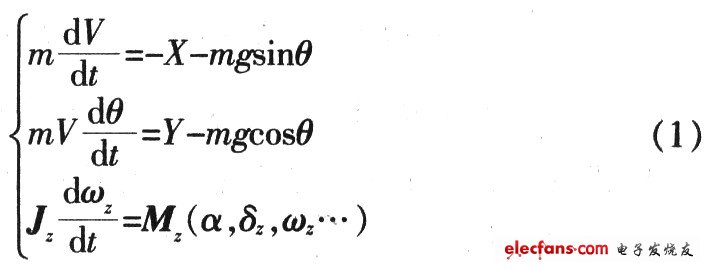
- 1 引 言2001年,美国发明家Kamen发明了一种新型的方便快捷的两轮交通工具“Segway”,行走平衡控制技术成为全球 ...
- 关键字:
DSP芯片 双轮电动车 机器人
- 前言机器人惯量前馈技术是贝加莱公司的一项非常重要的技术,即使在整个业界也是一项前沿的技术,它能解决机器人...
- 关键字:
前馈控制 机器人 PID
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473