人工免疫系统是基于生物免疫系统特性而发展的新兴智能系统。利用免疫系统的克隆选择机制,提出一种用于函数优化的改进免疫算法。其主要特点是采用克隆和自适应变异等操作,提高收敛速度和种群的多样性。仿真程序表明,该算法能以较快速度完成给定范围的搜索和全局优化任务。
在工程实际中,很多问题都可转化为函数优化问题,而对于高维、非凸、且有多个局部极值点的函数优化问题,传统的基于梯度的算法通常不能求得理想解。免疫系统作为一种分布式自学习系统,能自适应地维持群体多样性及具有自我调节功能,导致基于免疫机制的算法具有整
关键字:
仿真 人工免疫 函数优化 免疫算法
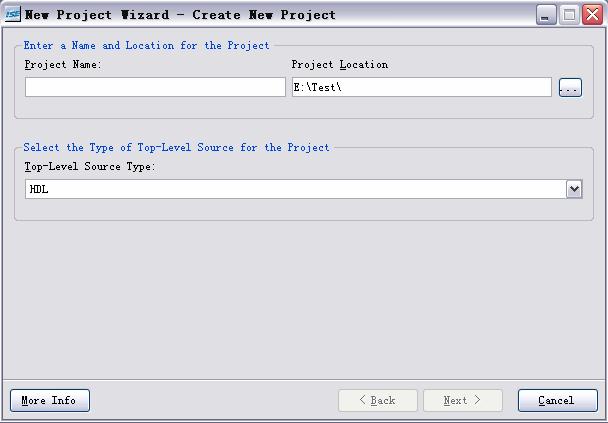
一、配置Modelsim ISE的Xilinx的仿真库
1、编译仿真库:
A、先将Modelsim安装目录C=Modeltech_6.2b下面的modelsim.ini改成存档格式(取消只读模式);
B、在DOS环境中,进入Xilinx的根目录,然后依次进入bin,nt目录;
C、compxlib -s mti_se -f all -l all -o C:Modeltech_6.2bxilinx_libs。
注意:需要根据你安装的modelsi
关键字:
FPGA Xilinx 仿真 开发环境 配置
据英国《新科学家》杂志报道,瑞典开发一种可充气的足球机器人,它们有一天将成群结队到火星地表上滚动,以进一步探测火星。设计此轻型探测器的工程师表示,它们将更加经济有效地探测其它行星的广大区域。
开创这一主意的瑞典乌普萨拉的埃米航空公司的佛瑞德林克·布鲁恩说:“我们的充气漫游车很轻便,可以行进很长的距离,且只需很少的能量。它们将非常便宜。一节充满电的电池将让这种漫游车行进大约100公里。”
大型球形机器人正在测试
在研究人员提出此滚动的球形漫游车之前
关键字:
机器人 探测器 火星车 瑞典
美国国家仪器有限公司(简称NI)推出图形化差分和用户接口工具包,它是帮助工程师和科学家辨别使用MathWorks, Inc. Simulink软件所建立的模型之间差别的软件解决方案。工程师和科学家还可以通过使用这个工具包方便地创建用户接口,与使用Simulink所建立的模型之间进行交互工作。快速方便地比对模型以及找出模型之间差异的能力使这款工具包成为团队应用程序开发的理想选择。它可适用于航天、汽车以及医疗等行业。此款工具包是由NI与一家总部位于德国的技术软件公司ExpertCont
关键字:
NI 图形化差分 用户接口 开发 仿真
一、概述
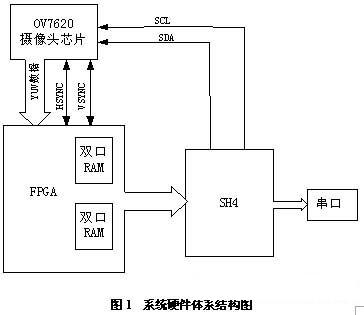
视觉技术是近几十年来发展的一门新兴技术。机器视觉可以代替人类的视觉从事检验、目标跟踪、机器人导向等方面的工作,特别是在那些需要重复、迅速的从图象中获取精确信息的场合。尽管在目前硬件和软件技术条件下,机器视觉功能还处于初级水平,但其潜在的应用价值引起了世界各国的高度重视,发达国家如美国、日本、德国、法国等都投入了大量的人力物力进行研究,近年来已经在机器视觉的某些方面获得了突破性的进展,机器视觉在车辆安全技术、自动化技术等应用中也越来越显示出其重要价值。本文根据最新的CMOS图像采集芯片设
关键字:
机器人 视觉系统 集成电路
德州仪器(TI)开发商大会(TI Developer Conference)5月26日起在中国召开。本次大会依次在深圳、上海和北京举办,在深圳的首场报告中,TI 首席科学家方进 (Gene Frantz) 和与会者分享了2020年半导体产业发展趋势,阐述科技将如何改变未来生活,并展示了一系列极富创意和前瞻性的崭新思想,将大众带入2020年的未来科技世界。这是半导体科技界让人充满期望的一次盛宴。
方进指出,随着对视讯影像、车用电子、通讯设备、工业应用及医疗电子等相关应用的需求提升,全球 DS
关键字:
德州仪器 DSP 集成电路 低功耗节能 SiP 机器人 医疗电子
德州仪器(TI)开发商大会(TI Developer Conference)于今日(5月26日)在中国正式展开了!本次大会依次在深圳、上海和北京举办,在深圳的首场报告中,TI首席科学家方进(Gene Frantz)和与会者分享了2020年半导体产业发展趋势,阐述科技将如何改变未来生活,并展示了一系列极富创意和前瞻性的崭新思想,将大众带入2020年的未来科技世界。这是半导体科技界让人充满期望的一次盛宴!
方进指出,随着对视讯影像、车用电子、通讯设备、工业应用及医疗电子等相关应用的需求提升,全球DS
关键字:
TI 绿色装置 机器人 医疗电子 嵌入式处理器 低功耗 SiP
英国朴茨茅斯和中国上海的一些科学家们一直致力于可以帮助人们构造更完美的机器人手臂的智能软件的开发研究。最近,他们又取得了进一步的成果。
他们一直在使用人工智能方法开发一套可以学习和复制人类手臂运动的软件,希望通过将其复制到机器人的设备上,使这种机器人手臂具有和人类手臂一样灵活的功能。
英国皇家协会还就此表彰了
关键字:
机器人 智能软件 传感器
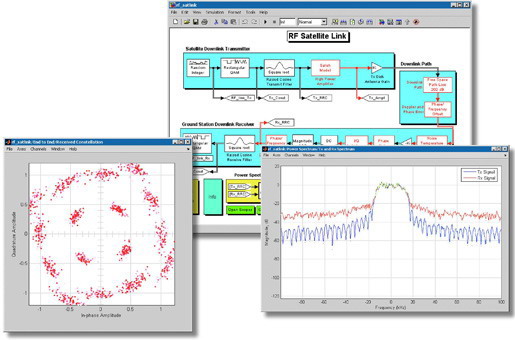
The MathWorks于今天宣布推出 Communications Blockset 4,该产品提供了用于通信系统物理层设计、仿真和验证的完整模块库,极大地扩展了 Simulink。
该最新版本为 WiMAX 和 Long Term Evolution (LTE) 通信系统的重要功能的代码生成和示例提供更多支持。代码生成功能提高了在多核计算机仿真的速度,而通过扩展的模块库,无线和通信工程师能够对采用更高带宽和更复杂信号处理技术的下一代无线系统进行仿真。
Communications B
关键字:
The MathWorks Communications Blockset 仿真 通信 模块库 无线通信
美国加州大学的科学家发明了世界上首个可杀死细胞的“纳米推进器”,它可在活细胞内快速杀死癌细胞从而达到治愈癌症的目的。
据介绍,机器人是由二氧化硅纳米粒子制成,抗癌药物可以装载在这种中到达病灶。
研究人员已用结肠癌和胰腺癌等多种人类癌细胞进行了实验,癌细胞在攻击下被杀死,且这种纳米机器人可携带多种抗癌灭杀药物,可以从细胞内部杀死多种癌症。科学家们相信这种癌症手,可以在更多的疾病治愈方面取得成功。
关键字:
癌细胞 机器人 结肠癌 胰腺癌
近日美国马塞诸塞州立大学科技人员成功研制出一种名叫uBOT-5的医疗辅助,这种机器人可以为病人听诊,它甚至还能够为急救的病人拨打急救电话911。
这个名叫uBOT-5的医疗辅助机器人,有两个轮子、可以用两只手捡起地上的小物件。此外,uBOT-5可以用为病人听诊,它甚至还能够为急救的病人拨打急救电话911。参与这项机器人研制工程的计算机方面专家罗德表示,“目前对于医学辅助机器人来说,还是首次进行这样的尝试。机器人第一次变得是如此可爱、如此得贴近大众的生活。”对于它的价格罗德
关键字:
医疗辅助 机器人
通过对巡线机器人运动控制系统的分析,提出采用有限状态机实现运动控制系统中的运动保护及机构定位系统的方法。
关键字:
设计 控制系统 机器人 状态 基于
引言
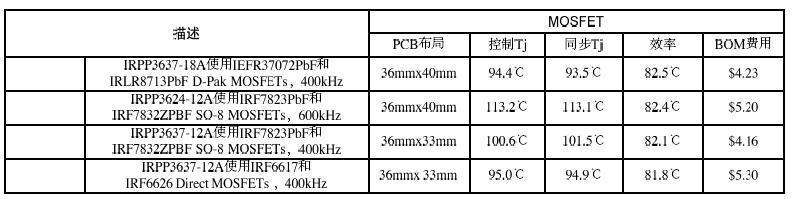
市场压力要求在更短的研发周期内推出新一代的各类产品,而耽误进入市场的结果会导致丢失机会和市场份额。由于不断地采用更小的形状因数、更高的性能,以及更快的频率速度来改变处理器单元,负载点功率管理电路经历了短的产品生存周期。系统工程师不再把电源设计当作一个与整个系统构造相分开的实体。在早期的设计努力过程中没有考虑集成功率从而导致过度的资源浪费,并且在后期也要求大量的产品修改和检查。为了利用分布式功率架构日益增长的功率密度、效率、灵活性,系统设计者必须同时对他们产品的最佳电性能,综合和可靠性设计进
关键字:
国际整流器 功率设计 电路设计 仿真
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473