- 这是一个简单到令人发指的仿生避障机器人,仅由电池、开关、马达组成最基础的电学电路,就能表现出类似自然界生物的智能!在遇到障碍物时会掉头,看起来有 点象一只疯狂的小强。只要有基本的物理电学基础就可以自
- 关键字:
机器人 制作 仿生 电路 电学 基础
- 摘要:设计并实现了一种激光半主动制导实物仿真系统,系统主要包括光电探测、信号处理和伺服部分。介绍了系统的工作原理以及主要电路的设计。该系统体积小,操作方便,控制灵活等优点。实际应用结果表明,该仿真系统
- 关键字:
系统 设计 实现 仿真 实物 主动 激光 制导 新型

- 外国牛人教你一步步快速打造首台机器人,这里面说到的东西都非常简单,看过这些教程以后,你可以在几个小时内制造出一个机器人。何乐而不为呢? 由于有很多细小的东西需要你们去了解,以下就给你介绍这些东西,而没有其他。如果你对所要求的掌握的东西有
- 关键字:
打造 机器人 快速 步步 人教 外国
- 在一个加速全球化的世界里,制造业走向数字化的趋势下,一些重大变化其实已经发生。智能软件、新材料...
- 关键字:
智能软件 工业革命 机器人
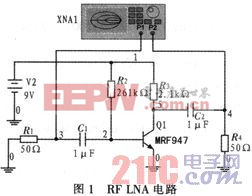
- 摘要:NI Multisim 10是著名的EDA软件,其仿真功能非常强大,RF电路中LNA的设计是一个难题。使用Multisim设计RF LNA电路,利用虚拟网络分析仪和Smith圆图,对典型RF LNA电路的各种参数进行仿真测试,进而设计阻抗匹配
- 关键字:
仿真 设计 LNA 射频 Multisim 基于
- 摘要 电力线通信设备的研发需要一种标准化的测试平台对电力线信道进行实时仿真,通过信道传输特性和各种噪声进行全面的测试和验证,而目前缺乏这样的平台。文中对电力线信道传输特性和噪声进行了深入研究,并在此基础
- 关键字:
设计 实现 FPGA 系统 仿真 电力线
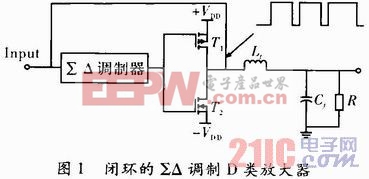
- 摘要 针对传统D类放大器脉宽调制技术引起的电磁干扰问题,将一个5阶低通sum;△调制器应用于一种带反馈闭环结构的D类放大器中。通过建立sum;△调制D类放大器的非理想模型,考察输出信号的功率谱特性。仿真分析表明,
- 关键字:
设计 仿真 系统 放大器 调制 基于
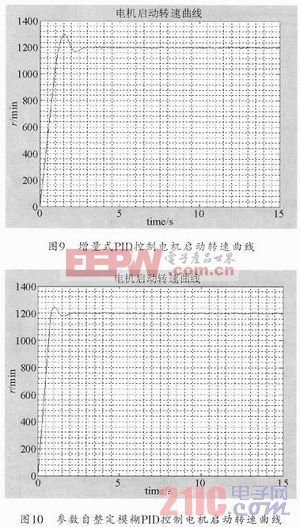
- 摘要:为提高伺服系统中无刷直流电机的控制效果,设计了以DSP为核心的无刷直流电机控制系统方案。本控制系统的主要优势在于利用数字信号处理器的高速实时运算处理功能,易于实现各种高效的控制算法,很好地解决了伺服
- 关键字:
设计 仿真 控制系统 伺服 直流 电机 BLDC
- 著名工程师和艺术家Ken Goldberg在最近一次Humans Invent的采访中谈论了云教育机器人的未来,以及他目前的工作--手术机器人的发展状况。Goldberg认为,机器人和人类一样具有学习能力。它能够学会绘制云存储中的信息,能够更快地建立和分享信息。目前,他正在研发一个外科手术机器人,名为乌鸦(Raven)。
Goldberg称该机器人已经通过了编程训练,并表示对初步的结果非常满意。而目前正在与美国加州大学,旧金山和约翰斯·霍普金斯大学的工程师合作,着力于如何针对放射性
- 关键字:
云存储 机器人
- Ⅰ 引言目前,功率因数校正问题是许多电器设备都需要解决的问题。对此,人们提出了许多的电路拓扑和控制方案来解决它。其中运用较为广泛的是利用BOOST型变换器来做功率因数校正。这是因为BOOST变换器具有许多其他电路
- 关键字:
电器 设备 功率因数校正 仿真
- 本文介绍了一种用Atmel89S51单片机仿真PLC控制的方法,设计适合刚性离合器冲床的控制器,介绍了用光电隔离的输入输出电路的基本构成和工作原理,重点介绍了内部键盘显示电路的设计思想,同时给出了冲床控制的电器原理
- 关键字:
控制 PLC 仿真 单片机 Atmel89S51
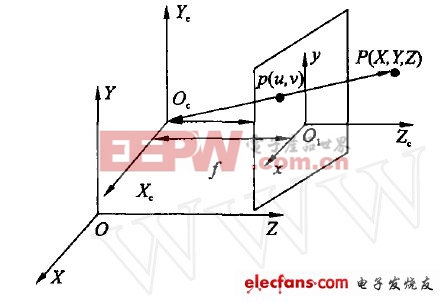
- 摘要: 针对移动机器人的局部视觉定位问题进行了研究。首先通过移动机器人视觉定位与目标跟踪系统求出目标质心特征点的位置时间序列, 然后在分析二次成像法获取目标深度信息的缺陷的基础上, 提出了一种获取目标的空
- 关键字:
设计 方案 定位 视觉 机器人 移动
- 关于quartus生成IP核的仿真出错问题的解决,对MegaCore的生成从头至尾操作了一遍,说实话很是复杂,不过,大家都知道quartus的IP可以直接拿来用的,大大节省了开发时间,而且其代码是绝对优化的;所有的前奏都操作成功,设置没什么问题,开始对生成的fft.vhd文件
- 关键字:
出错 问题 解决 仿真 IP quartus 生成 关于
- 摘要:AT89C51单片机的交通灯控制系统是由AT89C51单片机、键盘电路、LED倒计时、交通灯显示等模块组成。系统除基本交通灯功能外,还具有通行时间手动设置、可倒计时显示、急车强行通过、交通特殊情况处理等相关功能,
- 关键字:
设计 仿真 控制系统 交通 AT89C51 单片机 基于
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473