- 在经历了机械式、电气式、模拟电子式仪表时代后,汽车仪表进入了如今的步进电机全数字式仪表时代。目前,国内部分中、高档轿车,均配套使用步进电机汽车仪表。其它汽车也正在配套该类型的仪表。步进电机汽车仪表,将
- 关键字:
汽车仪表 步进电机 控制算法 仿真
- 摘要:分布式发电(Distributed Generation,简称DG)技术是解决未来能源和环境问题的一个重要方向。这里提出一种分布式发电数模混合仿真系统的设计方案,用于分布式电源(Distributed Energy Resources,简称DERs)并网
- 关键字:
混合 仿真 系统 数模 发电 NI-PXI 分布式 基于
- 1 概述交通事故伤害中,约65%为易受伤害的道路使用者。行人作为道路使用者中的弱势群体,属于交通事故中的高危人群,死亡率极高。车辆与行人碰撞事故中,人体的损伤部位可以覆盖全身,行人头部和下肢损伤几率最大。研
- 关键字:
HyperWorks 汽车 仿真 中的应用
- 摘要:在一个四维二次超混沌系统的基础上,通过改变其中一个状态变量构造成一个新的超混沌系统,并且通过模拟开关自动切换状态变量,实现原超混沌系统和新的超混沌系统的自动循环切换。对新的超混沌系统的Lyapunov指
- 关键字:
电路 设计 仿真 切换 自动 混沌 系统 两个
- 1、 仿真的目的: 在软件环境下,验证电路的行为和设想中的是否一致。 2、 仿真的分类: a) 功能仿真:在RTL层进行的仿真,其特点是不考虑构成电路的逻辑和门的时间延迟,着重考虑电路在理想环境下的行为和
- 关键字:
modelsim 仿真 软件介绍
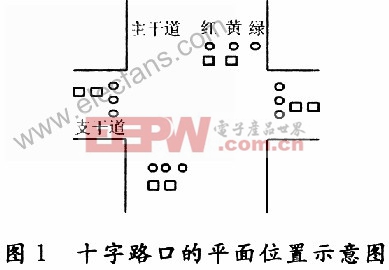
- 0 引言 Multisim 10是一款知名的EDA仿真软件,由加拿大IIT、公司于2007年推出最新版本。在Windows环境下,Multisim 10软件有一个完整的集成化设计环境,它将原理图的创建、电路的测试分析、结果的图表显示等全部
- 关键字:
系统 仿真 设计 控制器 交通 Multisim 十字路口 采用
- 提前进入未来世界 巡诊机器人实现远程医疗,如果你见到美国贝勒大学医学中心的机器人“贝西”,或许有身处未来的感觉。它已带领人们提前进入未来世界,享受前沿科学成果。有了它,医生可以在世界任何地方为千里之外的病人做检查,和病人进行“面
- 关键字:
机器人 远程医疗
- 达芬奇手术机器人系统简介,腹腔镜手术是一类外科手术,在手术过程中将一个长柄器械通过小切口插入患者体内需要动手术的目标部位。与传统的开放式手术相比,腹腔镜手术能缩短恢复时间、痛苦小、粘连少,使病人在术后能拥有更好的生活质量。但是
- 关键字:
达芬奇 机器人 系统
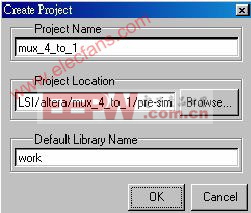
- 多路选择器设计及仿真,工作内容:
1、设计一个多路选择器,利用ModelSimSE做功能仿真;
2、利用Synplify Pro进行综合,生成xxx.vqm文件;
3、利用Quartus II导入xxx.vqm进行自动布局布线,并生成xxx.vo(Verilog
4、利用ModelSimSE做
- 关键字:
仿真 设计 选择
- 克服手动限制的外科手术机器人系统,手术是一类外科手术,在手术过程中将一个长柄器械通过小切口插入患者体内需要动手术的目标部位。与传统的开放式手术相比,腹腔镜手术能缩短恢复时间、痛苦小、粘连少,使病人在术后能拥有更好的生活质量。但是,手动
- 关键字:
手动 机器人 系统
- 一 学习单片机的捷径是什么?
所谓捷径就是少走弯路。我刚开始学单片机时走了不少弯路,很多朋友和我都有相似的经历,刚开始接触单片机,面对琳琅满目的图书教材,不知选择哪本;想实践时不知到哪买单片机;
- 关键字:
经验 使用 单片机 常用 机器人
- MCS -51单片机在我国应用最为广泛、经久不衰。以往单片机应用程序主要用汇编语言编写。由于汇编语言程序的可读性和可移植性都较差,采用汇编语言编写单片机应用程序不但周期长,而且调试和排错也比较困难。为了提高编
- 关键字:
使用 制作 仿真 Monitor-51 Keil
- 手术机器人进军医疗保健领域,近年来,机器人不仅用于工业领域,在医疗系统也已得到推广应用。如大名鼎鼎的手术机器人(SurgicalRobot)的问世不过短短10年,但同样取得重大进展。实际上,手术机器人是一组器械的组合装置。它通常由一个内窥镜(探头
- 关键字:
机器人 医疗保健
- 直角坐标机器人在汽车发动机涂胶机上的应用随着机器人技术的发展,机器人技术在各行各业中得到了广泛的应 ...
- 关键字:
直角坐标 机器人 汽车发动机 涂胶机

- 摘要:介绍了用于对20 kg级便携式AUV的运行状态进行控制的软件设计以及实现。该软件是基于MFC对话框运行于Windows操作系统下的程序,使用了多线程编程技术和串口通信技术。串口操作线程用于向串口读取或写入数据,并
- 关键字:
软件 设计 实现 控制 机器人 自主 水下 20kg
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473