- 目前,机器人控制器主要通过单片机来实现。但是,单片机是基于顺序语言的,其描述过程繁琐;处理速度受单片机时钟频...
- 关键字:
机器人
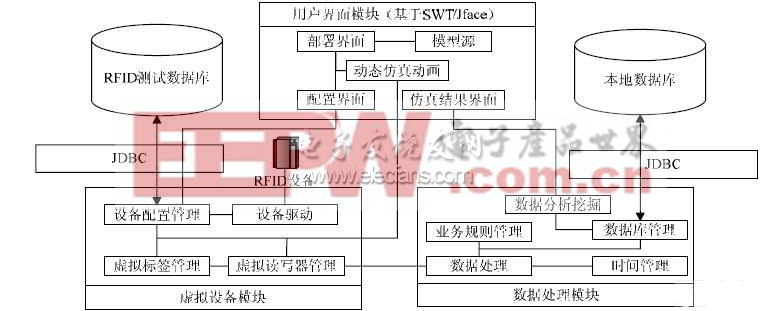
- 1 引言 RFID(Radio Frequency Identification)也称射频识别技术,可实现更大范围内的物品跟踪与信息共享,并大幅提高管理与运作效率,降低成本。目前RFID 应用软件多数都是围绕中间件或读写器进行设计[3],本文
- 关键字:
仿真 设计 部署 应用 RFID 组态
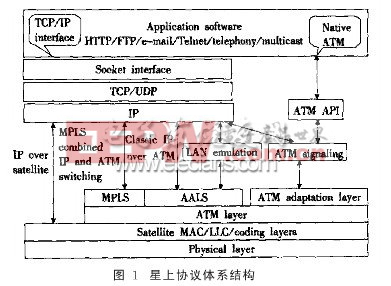
- 引言 未来全球通信系统的重要组成部分就是低轨卫星网络通信系统。由于低轨卫星通信系统的建立周期长、投资巨大,一旦建成不易对系统更改等特点,必须在系统实现前进行精确的仿真验证。OPNET是一款性能优良的网络仿
- 关键字:
仿真 平台 研究 协议 网络 OPNET LEO 卫星 基于
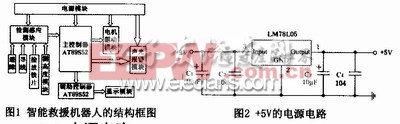
- 引言 智能机器人之所以叫智能机器人,这是因为它有相当发达的“大脑”。在脑中起作用的是中央计算机,这种计算机跟操作它的人有直接的联系。最主要的是,这样的计算机可以进行按目的安排的动作。正因为
- 关键字:
设计 机器人 救援 智能
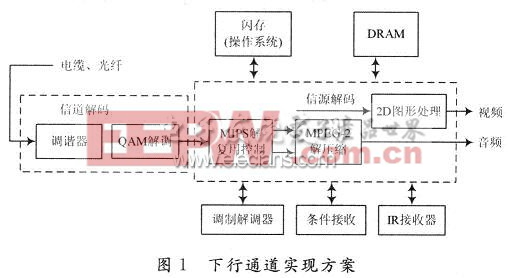
- LEON2应用于DCPU的FPGA仿真,近年来,随着数字多媒体业务和Internet网络的迅速发展,新型数字机顶盒可以有效利用我国巨大的有线电视网络资源,完成视频点播、数字电视的接收及接入Internet等综合业务功能。
1 数字机顶盒总体设计方案
- 关键字:
仿真 FPGA DCPU 应用 LEON2

- 基于PC104的能移动机器人人机界面设计,移动机器人人机界面为移动机器人的运动控制提供直观的路径图形、运动速度和角度、障碍物信息等。通过ARM2210的串口UART0接收中心处理器PC104的运动信息,利用东芝公司的液晶控制器T6963C驱动STN液晶屏YL240128A,以及
- 关键字:
人机 界面设计 机器人 移动 PC104 基于
- 在日常生活和学习中充斥着高新技术的今天,“低技术”表达的是回归自然和传统,去挖掘人类早已拥有的聪明才智。低技术不要求我们一味地追求技术的尖端化,但其所展现的科技成果和科学理念同样精彩。本文将
- 关键字:
机器人 制作 NE555
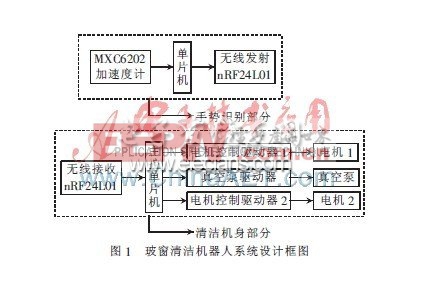
- 目前,市场上虽然出现了一些爬壁机器人,但至今还没有一种专门针对玻窗清洁的机器人。本文介绍了一种基于负压吸附的轮式玻窗清洁机器人,将其用于高层住宅的的玻璃清洗工作。使用该机器人可以避免玻窗清洁带来的高空
- 关键字:
清洁 机器人 轮式 吸附 负压 基于
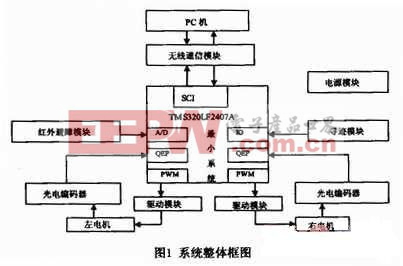
- TMS320LF2407A实现教育机器人硬件平台,引言 智能机器人作为一个高新科技的综合体,直接反应了一个国家信息技术的发展水平,受到了社会各界的高度重视。智能机器人涉及了信息技术的几乎所用内容,可以让学生接触并看到信息技术的全景,并且智能机器人是
- 关键字:
硬件 平台 机器人 教育 实现 TMS320LF2407A
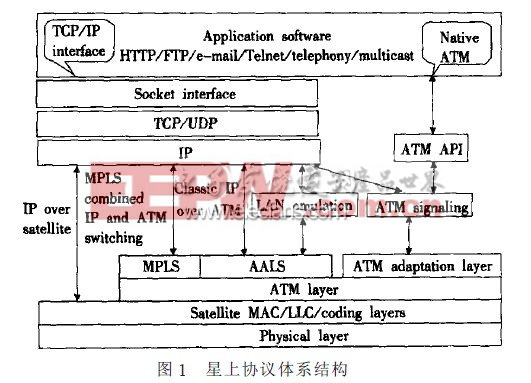
- 引言 未来全球通信系统的重要组成部分就是低轨卫星网络通信系统。由于低轨卫星通信系统的建立周期长、投资巨大,一旦建成不易对系统更改等特点,必须在系统实现前进行精确的仿真验证。OPNET是一款性能优良的网络仿
- 关键字:
模拟 仿真 协议 网络 卫星
- 摘要 针对电台训练中存在的问题,提出了基于单片机电台仿真训练系统,较好地解决了训练中电台的不足。并对系统的组成进行了介绍,阐述了该系统的优势和应用范围,可以更好地保障军事任务,有利于推动部队武器装备的仿
- 关键字:
系统 实现 训练 仿真 单片机 电台 基于
- 摘要:介绍了用Multisim仿真软件分析三态门工作过程的方法,目的是探索三态门工作波形的仿真实验技术,即用Multisim仿真软件中的字组产生器产生三态门的控制信号及输入信号,用Multisim中示波器、逻辑分析仪多踪同步
- 关键字:
Multisim 三态门 逻辑 仿真
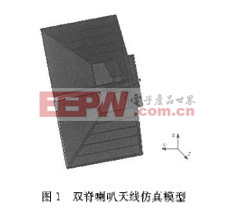
- 引 言对喇叭天线而言,最常用的展宽频带的方法是在波导部分及喇叭张开部分加入脊形结构。虽然该天线已应用于某些工程实际中,但是此类天线在频率大于12 GHz时,增益下降,方向图主瓣出现分裂,并且随着频率的升高,主
- 关键字:
设计 仿真 天线 喇叭 HFSS 双脊 基于

- 摘要:为了在高技术条件下的局部战争中把握战场的主动权,充分发挥军事通信网的保障作用,运用OPNET仿真建模技术,设计了一个简单的军事通信网扩展WLAN的拓扑结构,实现了在三个不同场景下的网络延时、丢包率、网络总
- 关键字:
WLAN 仿真 扩展 通信网 OPNET 军事 基于
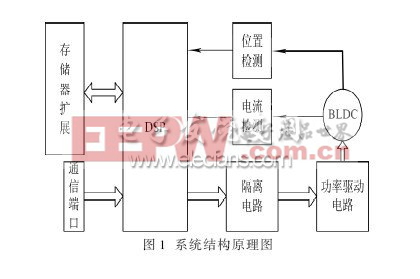
- 基于DSP的覆冰机器人控制系统研究,DSP(digital signal processor)是一种独特的微处理器,是以数字信号来处理大量信息的器件。其工作原理是接收模拟信号,转换为0或1的数字信号。再对数字信号进行修改、删除、强化,并在其他系统芯片中把数字数据解译
- 关键字:
研究 控制系统 机器人 DSP 基于
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473