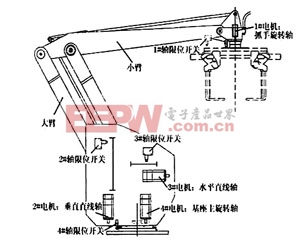
- 目前在用的工业码垛机器人种类繁多,但根据其多轴控制系统的技术特点一般可分为三种类型:1)基于PLC的多轴控制系统;2)基于PC的多轴控制系统;3)基于总线的多轴控制系统。其中,总线控制系统具有数字信号传输、系
- 关键字:
控制系统 应用 研究 机器人 工业 总线 技术 CAN
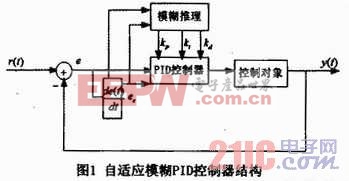
- 摘要:本文把MATLAB中的Fuzzy Toolbox和SIMULINK结合起来,讨论了模糊逻辑控制器的设计与仿真问题,以实现PID控制器参数的自调整,提高系统控制的精度。仿真结果表明,模糊PID控制器明显改善了系统的动态性能和稳态性
- 关键字:
仿真 研究 设计 控制器 PID 模糊
- 在各大卖场的清洁用品区,常可看到一台圆盘状的机器在一个大桌面上滑动,碰到边会自己转换方向,就这样随机到处滑行,听说就能把家里的地板打扫干净。这可以说是目前真正进入生活中的机器人雏形的代表,虽然一点人样都没有
- 关键字:
CEATEC 机器人
- 摘要:利用GaAsFET的非线性特性设计了一个X波段二倍频器,输入频率为6.1~6.3 GHz,输出频率为12.2~12.6 GHz,带宽400 MHz。在理论计算的基础上,结合微波仿真软件ADS对输入匹配电路、输出匹配电路和平行耦合带
- 关键字:
ADS 仿真 X波段 倍频器
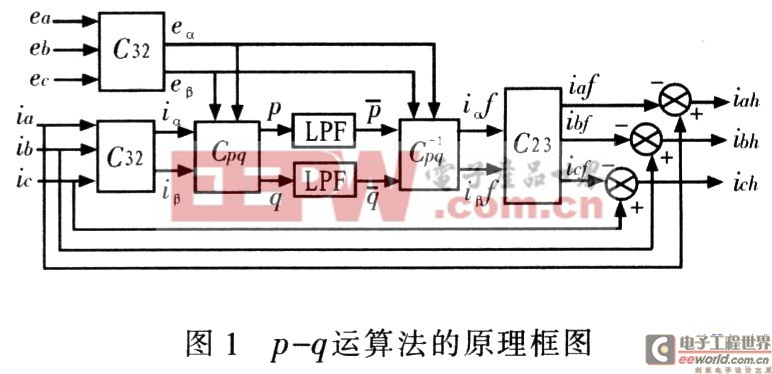
- 如何提高电压质量、治理谐波就成为输配电技术中最为迫切的问题之一。低成本的无源滤波器PF(Passive Filter)是目前普遍采用的补偿方法,但其滤波效果与系统运行参数密切相关,在特定情况下无源滤波器还可能与系统发生
- 关键字:
仿真 研究 滤波器 电力 混合 有源 工业控制
- 地震的频繁和对机器人天生的喜爱之情让日本的救援机器人层出不穷3月11日,影响日本东部海岸的地震使岛国...
- 关键字:
日本抗震 机器人
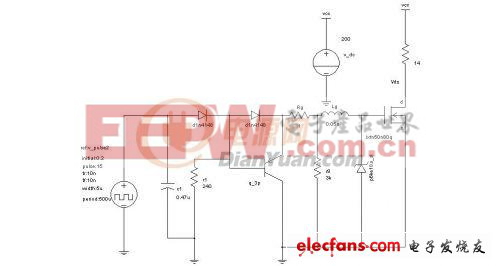
- saber下MOSFET驱动仿真实例,设计中,根据IXYS公司IXFN50N80Q2芯片手册中提供的ID-VDS,ID-VGS和Cap-VDS等特性曲线及相关参数,利用saber提供的Model Architect菜单下Power MOSFET Tool建立IXFN50N80Q2仿真模型,图5-1所示MOSFET DC Characteris
- 关键字:
实例 仿真 驱动 MOSFET saber
- 电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
- 关键字:
机器人
- 摘要:为了解决专用音乐播放芯片只能一次性烧录、播放内容不可变的缺点,文中给出了采用单片机来设计音乐播放器,同时通过Proteus软件对基于AT89S52单片机的音乐播放器进行仿真的实现方法。利用该方法设计的播放器的
- 关键字:
仿真 制作 播放器 音乐 单片机 基于

- 日本的机器人专家计划使用KOHGA3地面机器人在日本本州岛东北部八户地区的一座坍塌的大楼里进行侦测。(图中所示是正在测试中的机器人)。
在日本仙台发生9级大地震之后,日本投入使用更多的机器人协助搜救和复原工作。
我们此前报导过,两支救援队正在整装待发,准备部署地面机器人和蛇形机器人。一支救援队位于东京,另一救援队位于仙台,并且他们准备在必要时到达日本任何地区参与搜救。
现在,我们了解到,另外两支救援队也准备使用机器人。一队由千叶理工学院的Eiji Koyanagi教授率领,他们是应位
- 关键字:
IEEE 机器人
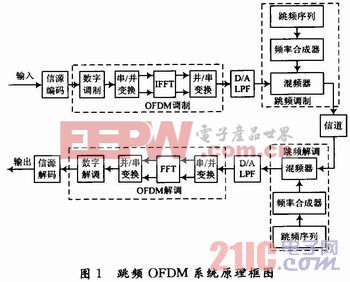
- 为了更形象地理解和掌握跳频OFDM系统的工作过程,在分析了跳频OFDM系统原理的基础上,基于Matlab中的图形用户界面(GUI)设计了整个仿真系统,并形象地设计出结构组成图。通过时实例的仿真,从而证实了仿真系统的可行性,结果显示该仿真系统界面友好,操作简单,并可以动态地设置参数,方便了仿真过程,系统性能较好,即使在较低信噪比情况下,系统的误码率仍然较小。
- 关键字:
仿真 设计 系统 OFDM GUI 基于
- 设计实现了一个5 V单电源供电的宽带放大器基本功能。核心部分采用高速运算放大器OPA820ID作为一级放大电路,THS3091D作为末级放大电路,利用DC-DC交换器TPS61087DRC为末级放大电路供电,在输出负载50 Omega;上实
- 关键字:
设计 仿真 放大器 宽带 电源 供电 5V
- 摘要:采用TI公司的高速运放OPA820ID作为一级放大电路,THS3091D作为末级放大电路,在输出负载50 Omega;上实现电压增益ge;40 dB,通频带宽为10 Hz~10 MHz,并利用MSP430单片机控制1602液晶显示输出电压峰峰值和有
- 关键字:
宽带放大器 仿真
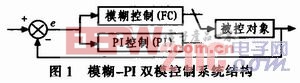
- 为了提高系统的控制性能,综合了模糊控制和PID控制的优点,提出一种基于模糊-PI双模控制器设计方法。典型的二维模糊控制器因缺少积分环节,难以消除稳态误差,控制的精度常常不能满足系统要求;而PI控制器具有良好的消除稳态误差的作用,所以将其与模糊控制器结合构成复合控制器。通过Matlab/Simulink仿真,结果表明,与经典的PID控制方式相比较,该控制方式在快速性、稳态性及准确性方面都有较大提高。
- 关键字:
仿真 设计 控制系统 双模 -PI 模糊
- 1引言零电流开关(ZCS)准谐振变换器(QRC)因其内在的软开关特点和电路的简单。而有多种DC/DC变换器的拓扑类型。一般讲,零电流开关是通过在开关器件上增加一对谐振电感和电容,使其在开关开通和关断时流过开关的电
- 关键字:
变换器 建模 仿真 谐振 开关 MATLAB 电流 基于
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473