- 摘要:针对一些电流型负载驱动需要一定的电流,同时还需要有较快的响应速度的问题。文中通过PSPICE并采用实际的器件模型仿真了一种电压转电流电路,该电路可增大驱动电流,并可实现电流的快速动态响应(时间为百ns级)
- 关键字:
实现 电路 变换 响应 快速 仿真 电流
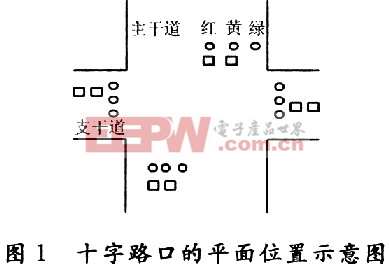
- 介绍运用Multisim 10仿真软件,设计一个十字路口交通灯控制器。该控制器实现了对十字路口交通信号灯控制。利用Multisim 10这种高效的设计平台,能够方便地设计电路,并用虚拟仪器库进行仿真以及验证电路是否达到设计要求。与传统的设计方法相比,它具有省时、低成本、高效率的优越性。
- 关键字:
设计 仿真 控制器 交通 Multisim 十字路口 基于
- quartus的IP仿真出错解决方案,大家都知道quartus的IP可以直接拿来用的,大大节省了开发时间,而且其代码是绝对优化的;所有的前奏都操作成功,设置没什么问题,开始对生成的fft.vhd文件进行编译,点击Start Compilation,第一感觉:慢!编译很慢,
- 关键字:
解决方案 出错 仿真 IP quartus
- 本文利用Simulink对三相桥式全控整流电路进行建模,对不同控制角、桥故障情况下进行了仿真分析,既进一步加深了三相桥式全控整流电路的理论,同时也为现代电力电子实验教学奠定良好的实验基础。 1 电路的构成及工
- 关键字:
电路 仿真 分析 整流 全控 Matlab/Simulink 三相 采用
- 电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
- 关键字:
TD-SCDMA 多频点组网 仿真 频率规划 N频点
- 电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
- 关键字:
频率合成器 仿真 锁相环 微卫星系统
- 电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
- 关键字:
仿真 军事 精确打击 导弹武器系统
- 电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
- 关键字:
无线网络 仿真 中兴通讯
- 数字电子钟广泛应用于各个公共场所,其电路设计的一般方法是连线多而杂,不便于理解其电路构成。利用中规模集成电路,设计了数字电子钟,由于采用了层次电路设计方法,将其分成各个单元电路设计成层次块,最后将各层次块连线成整机电路,连线美观,便于理解各单元电路功能,其整机电路功能也一目了然。
- 关键字:
Multisim 数字电子钟 仿真
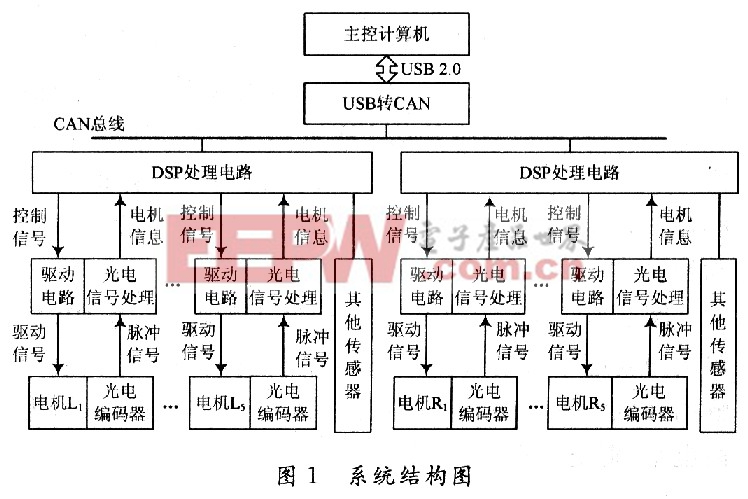
- 在仿人机器人研究领域,双足步行控制一直是其难点。主要介绍基于TI的DSP芯片TMS320F2812设计双足机器人的基本运动控制系统,围绕机器人腿部无刷直流电机的驱动进行优化设计。系统采用PWM进行电机调速,辅助以补偿参数,通过步态指令,验证电机运转的精确性、稳定性和系统的可操作性。电机调试为CCS仿真、步态规划和独立行走提供试验平台,使机器人能够实现步行功能。
- 关键字:
控制系统 设计 运动 机器人 DSP 双足 基于 编解码器
- 挑战:创建一个高精度的监督和控制系统,该系统能够在微创神经外科中,安全地移动机器人。
解决方案:使用NI CompactRIO平台开发一个安全的、统更合理、更灵活且更可靠的高性能机器人控制系统。
“由于CompactRIO
- 关键字:
CompactRIO 硬件平台 高精度 机器人
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473