电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
关键字:
仿真 HFSS RFID
摘要:本文应用PSpice对BOOST 电路的全部工作过程进行了仿真,对电路中储能元件的各种工作状态进行了分析,并从能量传递角度阐述了电路状态转换的本质原因,加深了对BOOST 电路全部工作状态的理解。BOOST(升压型)电路
关键字:
仿真 PSpice 电路 BOOST 解析
摘 要: 以Philips公司的ARM单片机LPC2119为控制核心,提出了一种自主式移动机器人的设计方案。应用98C1051构成多超声传感器子系统控制电路,由此子系统实现对障碍物的测距及机器人的自主避障行走控制;通过光敏传感
关键字:
机器人 设计 移动 自主 LPC2119 基于
神经网络PID控制器实现了两种算法本质的结合,借助于神经网络的自学习,自组织能力,可实现PID参数的在线调整,控制器自适应性好;该算法不要求被控对象有精确的数学模型,扩大了应用范围,控制效果良好;在合理选择神经网络的结构的情况下,该算法有很强的泛化能力。基于以上优点,神经网络PID控制器具有很好的发展应用前景。
关键字:
控制器 仿真 PID 神经网络 BP 基于
电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
关键字:
RFIC 封装 仿真
分布式放大器能提供很宽的频率范围和较高的增益。有一段时间,其设计通常采用传输线作为输入和输出匹配电路。随着砷化镓(GaAs)微波单片集成电路的发展成熟,为了提高效率、输出功率、减小噪声系数,人们提出了很多种
关键字:
宽带放大器 仿真 设计方法
Automated DDR3 Analysis
关键字:
Quamtum-SI DDR3 仿真
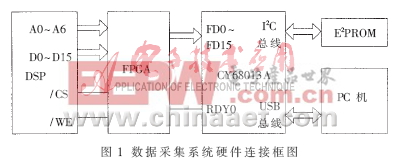
针对数字通信系统中底层协议栈开发过程中处理数据量大,出现问题不易再现、难于追踪的问题,设计了一种专门用于底层协议栈开发的高速数据采集、仿真系统。系统采用USB总线作为高速数据通路,使用FPGA进行格式转换及数据缓冲。论述了仿真系统的工作原理和系统框架,分析了数据转换、解析的流程,给出了系统仿真的一般模式。
关键字:
仿真 系统 数据采集 开发 底层 协议 适于 数字信号
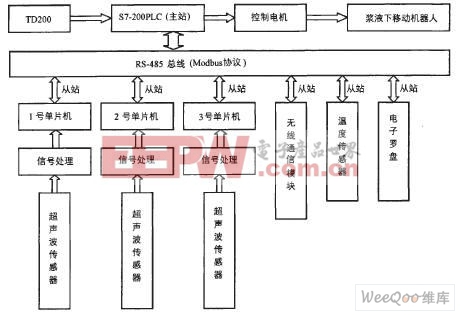
摘要:结合浆液下移动机器人系统的功能要求及PLC的特点,构建了桨液下移动机器人的控制系统。为提高该机器人系统的经济效益和实用性,简化机器人控制系统,以西门子PLC为主控制器构成整个机器人的控制网络。对网络
关键字:
控制系统 机器人 移动 浆液 PLC
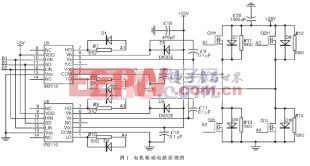
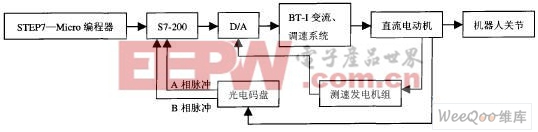
摘要:利用可编程控制器(PLC)控制系统的高可靠性、编程及维护方便、体积小的特点,将其应用于环流可逆调速系统中,研制出基于PLC的工业机器人关节直流伺服系统,通过环流可逆调速系统控制电机的正反转, 实现对工业
关键字:
直流 伺服系统 关节 机器人 工业 PLC
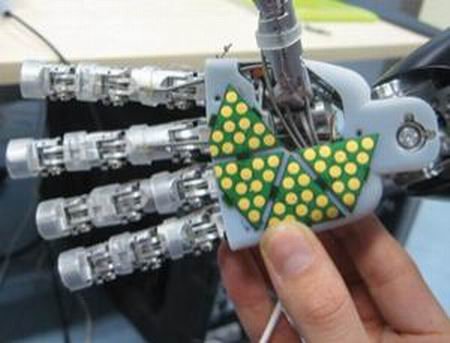
据英国《新科学家杂志》 报道,机器人装配皮肤不仅可以使它们更具审美感,同时也更让社会公众所接纳。触摸感应式皮肤还可以 避免机器人出现意外伤害。目前,意大利科学家最新研制一种机器人皮肤,可灵敏地感应到1克重物体的压力。这种最新机器人皮肤是由三角状柔性印刷电路板构成,它的作用相当于传感器,能够覆盖在iCub机器人表面。每个三角状柔性印刷电路板的边长 各3厘米,并包含12个电容铜触点。
iCub今年5月份,意大利科技协会一支研究小组将在iCub机器人上首次装配触摸式皮肤,据悉,这种新型 机器人皮肤
关键字:
机器人 传感器
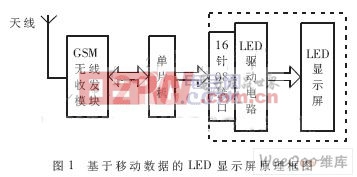
摘 要: 提出了一种基于移动数据的LED显示系统。在MCU的控制下,使用GSM无线模块TC35I接收合法用户通过短消息发送的显示信息,并按要求的方式在LED屏幕上显示出来,解决了传统LED显示屏使用有线传输的不便性问题。系
关键字:
设计 仿真 显示屏 LED 移动 数据 基于
摘要:介绍接收机前端的低噪声放大器(LNA)对于整个通信设备的接收机系统灵敏度的影响,利用ADS软件对接收机低噪声放大器进行改进设计,重点阐述了采用Smith圆图和微带线进行输入输出阻抗的匹配。通过仿真结果可以看出
关键字:
ADS 通信设备 低噪声放大器 仿真
数控振荡器(NumericallyControlledOscillators,NCOs)是软件无线电的重要组成部分和研究内容,它广泛应用...
关键字:
Simulink 仿真 LUTs技术 NCOs
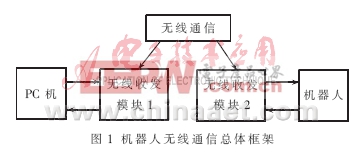
由于移动机器人左右两轮的非线性特征,其反馈调节无法克服这一特性,必须借助PC机来进行调节。为此提出了一种无线实时反馈控制方法,在PC机上加入PID控制算法,实现了对机器人的无线实时反馈控制。
关键字:
控制系统 设计 反馈 实时 机器人 无线 移动 通信协议
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473