- 电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
- 关键字:
无线网络 仿真 中兴通讯
- 数字电子钟广泛应用于各个公共场所,其电路设计的一般方法是连线多而杂,不便于理解其电路构成。利用中规模集成电路,设计了数字电子钟,由于采用了层次电路设计方法,将其分成各个单元电路设计成层次块,最后将各层次块连线成整机电路,连线美观,便于理解各单元电路功能,其整机电路功能也一目了然。
- 关键字:
Multisim 数字电子钟 仿真
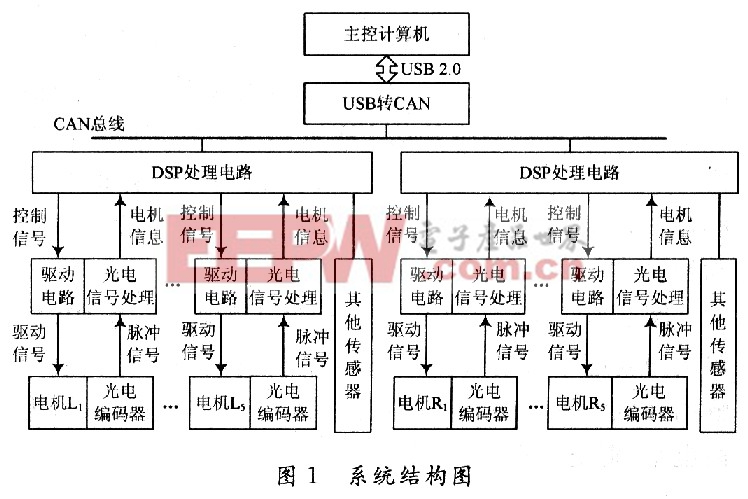
- 在仿人机器人研究领域,双足步行控制一直是其难点。主要介绍基于TI的DSP芯片TMS320F2812设计双足机器人的基本运动控制系统,围绕机器人腿部无刷直流电机的驱动进行优化设计。系统采用PWM进行电机调速,辅助以补偿参数,通过步态指令,验证电机运转的精确性、稳定性和系统的可操作性。电机调试为CCS仿真、步态规划和独立行走提供试验平台,使机器人能够实现步行功能。
- 关键字:
控制系统 设计 运动 机器人 DSP 双足 基于 编解码器
- 挑战:创建一个高精度的监督和控制系统,该系统能够在微创神经外科中,安全地移动机器人。
解决方案:使用NI CompactRIO平台开发一个安全的、统更合理、更灵活且更可靠的高性能机器人控制系统。
“由于CompactRIO
- 关键字:
CompactRIO 硬件平台 高精度 机器人
- 摘要:本文介绍一种嵌入式系统仿真方法,通过一种特殊设计的指令集仿真器ISS将软件调试器软件Keil uVision2和硬件语言仿真器软件Modelsim连接起来,实现了软件和硬件的同步仿真。 缩略词解释: BFM:总线功能
- 关键字:
仿真 解决方案 联合 软硬件 单片机 基于

- 基于ARM9嵌入式系统智能灭火机器人控制器设计,本文将从硬件和软件方面讲述智能灭火机器人控制器的实现方法,并且给出了机器人灭火的具体实验,验证了方案的可行性,为智能灭火机器人的进一步研究提供了平台。
- 关键字:
机器人 控制器 设计 灭火 智能 ARM9 嵌入式 系统 基于 编解码器
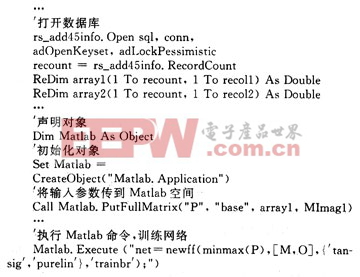
- VB调用Matlab在WEDM仿真系统中的应用,VB与Matlab混合编程简单方便,效率高,能够应用于WEDM仿真系统中,以实现系统功能。缺点是要依托于Matlab平台,执行速度慢,灵活性较差。
- 关键字:
系统 应用 仿真 WEDM 调用 Matlab VB
- 从错误中学习――不再仿真,前几天,我与一位从事硬核FPGA设计的设计师谈起我开发系统芯片的方式。由于我提到了‘FPGA’,因此他问我对于仿真器的感觉怎么样。而当我告诉他我已近三年不依赖仿真器后,他大吃一惊,觉得不可思议。这同我与许多其
- 关键字:
仿真 不再 学习 FPGA
- 引言
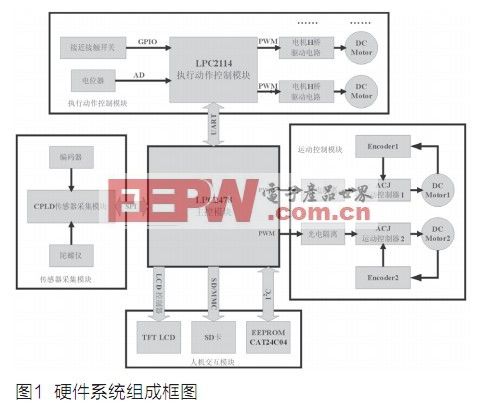
自主移动机器人是指具有行动决策和规划,以及自动执行能力,集人工智能、智能控制、信息处理、检测与转换等专业技术为一体的系统。一般移动机器人都是基于行为的,机器人只有到达指定位置才开始执行其他动作,因此导航和定位是移动机器人研究的重要问题。本文采用陀螺仪和光电编码器的惯性导航方式,并且采用LPC2478构建整个控制系统,并在一台机器人上得以实现。
本设计的轮式自动机器人的控制系统主要分为主控模块、传感器采集模块、运动控制模块、执行动作控制模块和人机交互模块五个部分。传感器采集处理模块主要
- 关键字:
机器人 传感器 智能控制 LPC2478
- 摘要:根据多模激励的单腔体谐振器原理以及基片集成波导(SIW)高Q值、低损耗、大功率容量的特点,提出了一种新的SIW方形腔体双膜滤波器的设计方法。该方法通过在SIW腔体两个对称角上切角作为微扰来使简并模式分离并产
- 关键字:
SIW 基片集成波导 带通滤波器 仿真
- C51跟atmega64的串行通信。相关理论知识这里就不多说,只提几个: 51的UART所用的几个寄存器SCON:SM0 SM1 SM2 REN RB8 TX8 RI TIPCON: SMOD -- -- -- --- --- PD IDLET2CON: TF2 EXF2 RCLK TCLK
- 关键字:
仿真 设计 PROTEUS UART 通信 串行
- 提出了一种基于自适应多速率算法的新VoIP系统方案,该方案可以根据网络信道质量的好坏来自适应地选择一种最佳的语音传输模式,从而在一定程度上保障了重构后的语音质量。在NS-2仿真平台下,通过与传统VoIP体系比较发现,所提出的新VoIP系统方案在语音QoS保障方面明要显优于传统VoIP系统。
- 关键字:
VoIP NS 模拟 仿真
- 今天给大家介绍一种即能像AVR Studio 一样进行代码级调试,又可以实时看到MCU 状态的软件,Proteus。 大家都 ...
- 关键字:
Proteus ICCAVR 调试 仿真
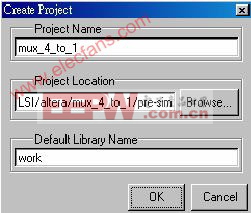
- ModelSim+Synplify+Quartus的Altera FPGA的仿真实现,工作内容:
1、设计一个多路选择器,利用ModelSimSE做功能仿真;
2、利用Synplify Pro进行综合,生成xxx.vqm文件;
3、利用Quartus II导入xxx.vqm进行自动布局布线,并生成xxx.vo(Verilog
4、利用ModelSimSE做
- 关键字:
仿真 实现 FPGA Altera Synplify Quartus ModelSim
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473