- 基于PLC的防爆机器人系统的控制,移动机器人由于具有优越的机动性和灵活性而备受青睐,在许多场合投入实际应用,如核工业检测,消防、火场检测,有毒、易燃、易爆气体场所探测,采矿、星球探测及无人战场等。为了适应不同环境下的应用,移动机器人控
- 关键字:
系统 控制 机器人 防爆 PLC 基于
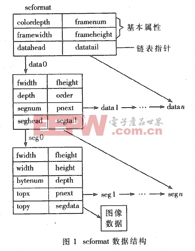
- 基于远程机器人系统的自动控制平台的研究与设计,摘要:论述了面向远程机器人的自动控制平台的研究设计。对原有的控制系统进行了简单介绍,从设计思想、一个专用的数据结构以及运行流程方面对新的自控平台进行了描述。关键词:远程机器人自动控制运行脚本1自动控制平
- 关键字:
平台 研究 设计 自动控制 系统 远程 机器人 基于
- 摘 要: 依据现代机器人技术的发展特点,提出了一种基于ARM(Advanced RISC Microprocessor)、DSP和 arm-linu ...
- 关键字:
嵌入式系统 控制系统 ARM 机器人
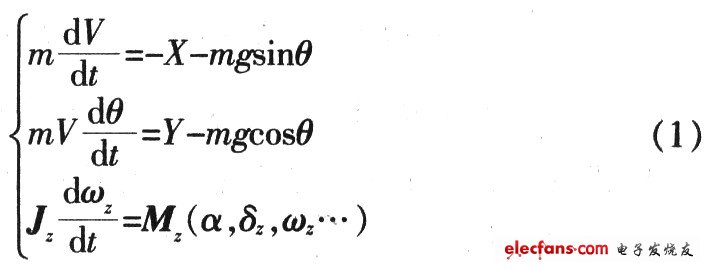
- 一、引言三级式无刷交流同步发电机由副励磁机、励磁机和主发电机组成。主发电机为旋转磁极式同步发电机;交流励磁机是旋转电枢式同步发电机;副励磁机为旋转磁极式的永磁同步发电机。交流励磁机转子上装有整流器(旋
- 关键字:
及其 仿真 分析 建模 系统 交流 发电机 调压 三级
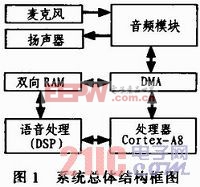
- 摘要:文中阐述的是家庭监护机器人项目中语音识别系统设计的部分,通过DSP、DMA和ARM Cortex-A8的并行处理,利用双缓冲的方法,在嵌入式Linux上实现了基于ATK的实时语音识别系统。文中对该系统的软硬件进行了设计。在
- 关键字:
监护 机器人 实现 家庭 系统 语音 识别 实时
- 1引言随着电力电子装置的广泛应用,大量低功率因数的二极管不控整流和晶闸管相控整流设备,仅能实现能量的单向输送,对电网的谐波污染严重。可逆PWM整流器不仅具有能量可双向传输、网侧电流正弦及达到单位功率因数等
- 关键字:
PWM 滑模控制 仿真 三电平
- 对微处理器、图形芯片或复杂设计的仿真通常要求降低目标系统的速度,因为即使快速FPGA也可能跟不上高速目标系统的速度,本文介绍一种基于速度匹配软件的网络芯片仿真方法,并指出采用这种新技术需要注意的事项,值得
- 关键字:
速度 软件 仿真 方法
- 血氧仪核心硬件电路设计及Multisim仿真,脑组织新陈代谢率高,耗氧量占全身耗氧量的20%,而且对缺氧特别敏感,短时间缺氧就有可能造成中枢神经系统不可恢复的损伤。心脏病患者,易发心绞痛、心肌梗塞,这两种情况,多数是因为血管堵塞,导致缺氧造成。心肌
- 关键字:
Multisim 血氧仪 核心 仿真
- 医学机器人进入临床医学应用,加拿大卫生部门近日宣称,将在国内推广一种实施神经外科手术的机器人,这种医学机器人有特别敏感的触觉,可以让医生通过最清晰的视觉来完成大脑的显微手术。其精确度可以达到一根头发丝的程度,甚至连最小的神经也有
- 关键字:
机器人

- 1 引言在项目开发中采用从英国进口的SRF05 超声波传感器,它的回波反馈与测距方式与通常使用的超声波传感器相比较特别, 在ARM中实现也稍有难度, 但该传感器精度很高可达到1cm, 因此用该传感器去掉了用于近距离测距
- 关键字:
设计 原理 导航 机器人 移动 超声波
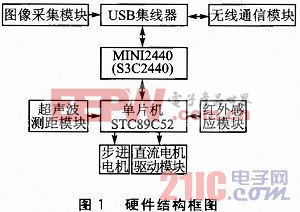
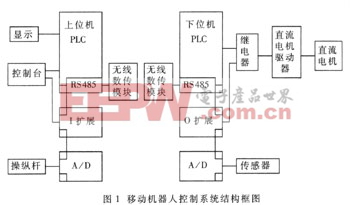
- 基于OPenWrt的移动机器人系统设计,摘要:嵌入式移动机器人实现了全方位自主移动及避障、行走中的图像采集和无线数据传输。采用ARM处理器S3C2440作为主板控制器,选择OpenWrt作为操作系统。系统采用2层架构,上层以S3C2440为核心,负责图像采集,并将图
- 关键字:
系统 设计 机器人 移动 OPenWrt 基于
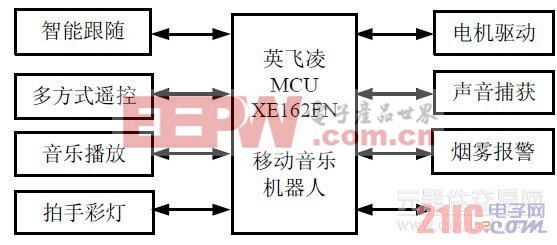
- 0 引言随着控制技术、计算机技术、信息处理技术和传感器技术的发展,智能机器人无论是在工业领域还是消费电子领域都已经扮演了非常重要的角色,已成为人工智能研究和发展的热点之一。在语音控制机器人领域,有研究表
- 关键字:
方案 解析 设计 机器人 音乐 移动
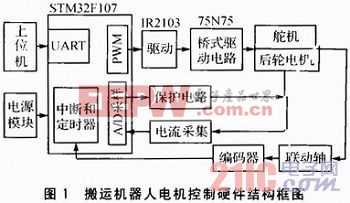
- 摘要:针对搬运机器人的前轮转向舵机和后轮驱动电机的控制要求,采用以Cortex-M3为内核的STM32F107作为主控制器,采用嵌入实时操作系统mu;C/OS-II,将程序分成启动任务、电机转速控制任务、舵机控制任务等相对独立
- 关键字:
控制系统 设计 电机 机器人 STM32F107 搬运 基于
- 摘要:介绍一种以输出特性为基础的光伏电池数学模型,该模型通过光伏电池的4个标准性能参数拟合出电池输出特性,它能模拟光伏阵列在任意太阳辐射强度、环境温度下的输出特性。最后,在Matlab/Simulink环境下建立光伏
- 关键字:
模型 研究 仿真 电池 Matlab Simulink 基于
- 摘要:文中在对交流调压电路和不可控整流电路做出理论分析的基础上,给出了单相、三相静电除尘电源系统的数学模型,建立了基于MATL AB/Simulink静电除尘单相、三相电源的仿真模型,用Power System工具箱进行仿真,用
- 关键字:
电源技术 仿真 除尘 静电 MATALAB 基于
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473