- 1 引言 如图1所示,一般的级联型高压变频器的整流部分都是采用不可控的二极管,因而能量传输不可逆,当电机处于再生发电状态时,回馈的能量传输到直流母线电容上,产生泵升电压,使电容电压不稳。过高的泵升电压有
- 关键字:
变频器 仿真 研究 高压 功能 能量 回馈 具有
- 一、 衰落 衰落从范围上来讲,大体分为三种情况:大区域衰落,小区域衰落和室内衰落。如图1所示,大区域衰落指的是信号在长距离(几百个波长以上)传播时的平均衰减,主要由大气损耗,建筑物或大的物体如山丘、树木
- 关键字:
移动设备 接收机 仿真 性能测试
- 当代机器人研究的领域已经从结构环境下的定点作业中走出来,向非结构环境下的自主作业方面发展。而机器人灵巧手相当于安装在机器人臂上的可独立实现精细操作运动的一组机器人,是真正拟人化并能实现灵活操作的机器人
- 关键字:
控制系统 设计 巧手 机器人 PIC 单片机 基于
- [next]摘要:该文在介绍有限冲激响应(FIR)数字滤波器理论及常见实现方法的基础上,提出了一种基于FPGA的高...
- 关键字:
FIR 设计 仿真
- 1 引言 本文基于PSPICE和EWB两种仿真软件,分析讨论将微弱电流转换成3-5V电压的电路仿真。 2 PSPICE ...
- 关键字:
电流 电压 转换电路 仿真
- 摘要:本文基于OrCAD/Pspice电子线路计算机辅助分析设计软件以实现高频电子线路的综合电路分析仿真为目的,针对回路使用的信号频率比较高,电路实现的功能多、结构复杂,造成OrCAD设计软件在仿真过程时运算量大,电
- 关键字:
线路 仿真 分析 电子 高频 OrCAD 电路 设计软件 基于
- 1引言开关电源是目前用途非常广泛的一种电源设备,然而随着开关频率以及开关速度的不断提高,产生的电磁干扰越来越大,由于市场准入制度的实施,电磁干扰研究已引起了足够的重视。干扰源是电磁干扰的三要素之一,是电
- 关键字:
仿真 分析 干扰 电磁 MOSFET 电压 开关电源
- 摘要:利用51系列单片微型计算机实现洗浴服务机器人控制系统的设计。以单片机芯片AT89C51作为核心控制器,通过硬件电路设计及软件程序编制,设计洗浴服务机器人完成洗浴过程的控制系统。洗浴控制系统通过对温度控制、
- 关键字:
控制系统 设计 机器人 服务 实现 洗浴 单片机
- 基于DSP TMS320F206的仿真调试, TMS320F206(以下简称F206)是C2XX系列DSP中的一个产品,其独有的片内32KB的闪速存储器FLASH使其仿真调试与众不同。F206带有程序、数据和I/O三个相互独立的存储空间,每个存储空间均为64Ktimes;16位,其中片内双访问
- 关键字:
调试 仿真 TMS320F206 DSP 基于

- 引言信号传输一般可分为两大部分:编码与解码。其中编码要求根据所传输信号特点选择合适的编码方式。由于不同的信号在不同的环境中进行传输,受到的干扰是不同的,而选择合适的编码方法可以最大限度的避免干扰,使通
- 关键字:
设计 仿真 波形 编码 VHDL 通信 基于
- 摘要:为了配合在PC机上运行的软PLC编辑开发系统,使PC机完成相应的控制功能,设计和开发了软PLC编译系统。本文简述了软PLC编译系统的组成以及软PLC梯形图和指令表的遍历算法,介绍了软PLC梯形图与指令表程序相互转换的实现过程。
- 关键字:
仿真 开发 系统 编译 PLC
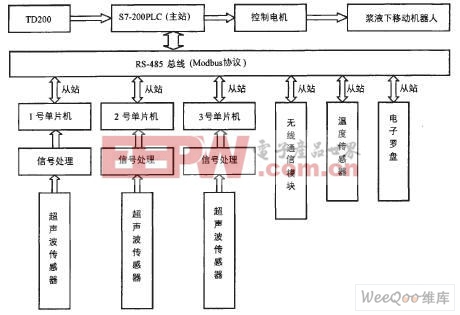
- 摘要:结合浆液下移动机器人系统的功能要求及PLC的特点,构建了桨液下移动机器人的控制系统。为提高该机器人系统的经济效益和实用性,简化机器人控制系统,以西门子PLC为主控制器构成整个机器人的控制网络。对网络通信,电机控制的关键技术进行了探讨,并完成了整个控制系统的软件程序设计。该系统的实现对于研究以PLC控制移动机器人的相关技术具有指导意义。
- 关键字:
控制系统 设计 机器人 移动 PLC 浆液 基于
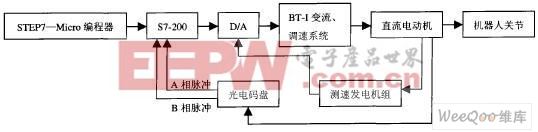
- 利用可编程控制器(PLC)控制系统的高可靠性、编程及维护方便、体积小的特点,将其应用于环流可逆调速系统中,研制出基于PLC的工业机器人关节直流伺服系统,通过环流可逆调速系统控制电机的正反转, 实现对工业机器人关节的伺服控制。其优点是在改变电机正反转时无需改变线路结构,使工业机器人关节的伺服控制更简单、可靠和稳定。
- 关键字:
直流 伺服系统 关节 机器人 PLC 工业 基于
- 分布式放大器能提供很宽的频率范围和较高的增益。有一段时间,其设计通常采用传输线作为输入和输出匹配电路。随着砷化镓(GaAs)微波单片集成电路的发展成熟,为了提高效率、输出功率、减小噪声系数,人们提出了很多种
- 关键字:
宽带放大器 仿真 设计方法
- 三相异步电动机具有结构简单、价格低廉、维护方便、运行可靠等许多优点,因而获得了广泛应用。但在采用较简单的方法调速时,性能远不如直流电动机。随着科学技术的发展,特别是半导体制造技术的长足进步,以变频调速
- 关键字:
仿真 研究 MATLAB 系统 现代 调速 SVPWM
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473