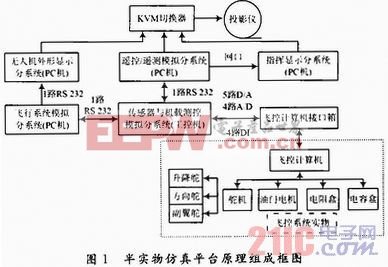
- 摘要:介绍了某型无人机飞控系统半实物仿真平台的总体功能,阐述了该平台的硬件选型原则、选型方案、基本功能及自制部件的设计过程,对各分系统仿真软件设计框架进行了描述。最后,通过实际仿真对平台的设计功能进行
- 关键字:
平台 设计 仿真 实物 系统 无人机
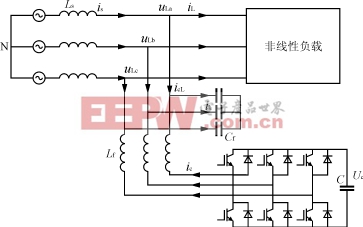
- 摘要:提出一种增加局部反馈的控制方法,对传统有源电力滤波器控制方式进行了改进。该方法具有能较彻底地消除系统振荡,同时降低电网侧电流和公共连接点电压畸变率的优点。仿真分析结果验证了该方法的有效性。关键词
- 关键字:
控制 方法 仿真 分析 振荡 系统 有源 电力 滤波器 消除
- 随着太阳能发电技术的发展,太阳能电池已在交通、通信、家庭灯具电源、卫星、航天器的电源系统等很多领域被...
- 关键字:
太阳能 电池升压 仿真

- 在完成上一个以简单电学电路为基础的避障机器人项目后,我们将进行第三个PVC机器人项目制作。这是一个比较特殊的机器人,首先其控制电路比上一个项目稍微复杂了一点,是以电子元器件组成的;其次这个机器人不再以传统
- 关键字:
可爱 蚊子 DIY- 机器人 动力 昆虫 太阳能

- 想挣脱地心引力的束缚?想练习跑酷在垂直的墙壁上疾走?——不要用崇拜的目光注视我,虽然我就是飞檐走壁,仁者无敌的可爱玲珑Wallbots!当然我也不介意你称呼我的艺名:【蜘蛛侠】墙面上爬来爬去的是神马?!
- 关键字:
简单 机器人 可以 一个 元器件 DIY 电子
- 电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
- 关键字:
基带衰落 仿真 手机综合测试 8960
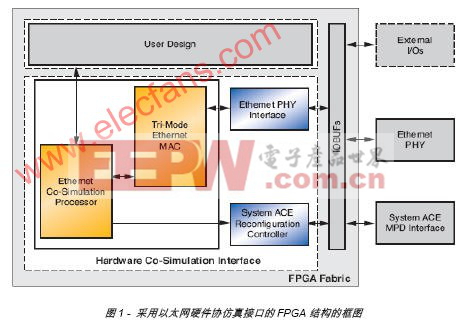
- 通常情况下,在设计基于FPGA的大型信号处理系统的时候,设计人员往往需要进行费时费力的仿真。以Xilinx System Generator for DSP为代表的FPGA设计工具,通过提供可靠的硬件在环接口(该接口可以直接将FPGA硬件置入设
- 关键字:
仿真 便捷 带宽 实现 接口 硬件 基于 以太网
- 摘要:介绍了以RC串并联选频网络为主振电路的电子琴设计方法,给出了八音阶电子琴电路参数的设计方法和一组参数值。并采用Multisim 10对RC串并联正弦渡振荡电路进行了设计仿真。结果证明,用模拟电路方法制作电子琴结
- 关键字:
Multisim 电子琴 仿真
- 电源与地之间的输入阻抗是衡量电源供电系统特性的一个重要的指标,影响电源供电系统特性的因素有:PCB的分层、电路板的布线、电源/地平面的形状、元器件的布局、过孔和引脚的分布、IC的工作频率等等因素。为了降低电
- 关键字:
电磁场 测量技术 仿真 电源

- 以下是建造这个机器人所耗费物品的清单: 花费:120美元 时间:20小时 制动器/输出设备:声音放大器、6个齿轮电动机,两个扬声器 控制方法:自主控制 CPU:Picaxe 28 操作系统:Picaxe basic 电
- 关键字:
演奏 机器人 导航 无线 GPS 国外
- 摘要:随着单片机系统的广泛应用和计算机网络技术的普及,单片机的通信功能愈来愈显得重要。单片机通信是指单片机与计算机或单片机与单片机之间的信息交换,通常单片机与计算机之间的通信用的较多。本文以温度检测数
- 关键字:
语言 开发 仿真 单片机 串口 通信 基于
- 摘要 介绍了一种车载充电系统开关电源的工作原理,并对其实际工作中的EMI问题进行分析讨论,利用仿真软件Hyperlynx对该系统的PCB板图进行了电磁兼容仿真分析,得到PWM信号所在网络的电压波形和EMC频谱图,仿真结果显
- 关键字:
仿真 分析 EMC 开关电源 充电 系统 车载
- 摘 要: 介绍了一种基于SPCE061A 的智能音控小车机器人的设计过程, 给出了智能小车的硬件构成。从软件设计的角度阐述了小车使用语音辨识和中断技术的智能控制算法, 并详细说明了语音辨识技术在智能小车上的实现过程
- 关键字:
机器人 设计 小车 智能 SPCE061A 基于
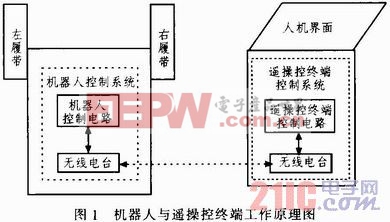
- 摘要:单兵作战用机器人方便携带、操控简单、可代替人类到达危险环境作战。机器人通过无线电台接收遥操控终端发送的控制指令,按照指令行动;同时机器人采集自身的状态信息,发回遥操控终端。手持遥操控终端的士兵能
- 关键字:
设计 控制系统 机器人 单兵作战
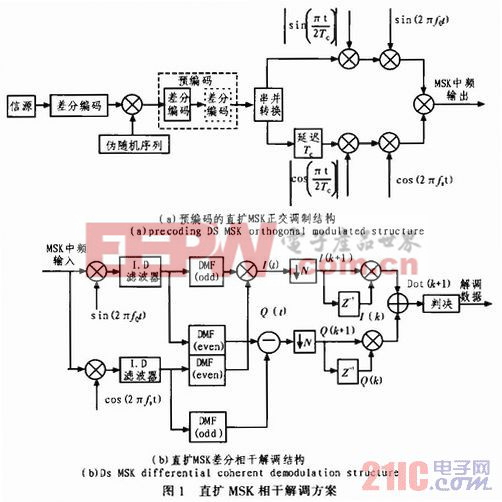
- 摘要:根据MSK信号的特点,分析了直扩MSK信号的解调方法。基于两种可能的应用形式,在Matlab/Simulink环境下搭建了直扩MSK信号差分相干解调与包络非相干解调的仿真模型。然后进行了性能仿真。所得结论为直扩MSK信号
- 关键字:
分析 仿真 方法 解调 MSK 直扩
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473