基于航迹推算的移动式机器人定位系统设计

摘要:为实现移动式机器人的智能工作,研究了航迹推算定位技术,采用陀螺仪、光电编码器等传感器对已知航线的机器人进行行走定位。系统由驱动模块、传感器和反馈模块以及控制模块等组成,其模块化设计充分整合了系统资源,抗干扰能力强,同时使用了伺服器驱动电机减小行走误差,成本低廉,可移植性强,能很好地运用于工业加工机器人和特种作业机器人。
关键词:航迹推算;陀螺仪;光电编码器;伺服器;模块化设计
自工业革命以来机械被广泛运用到各个领域。随着人类社会生产的发展,人们越来越需要高智能、高精度的机器完成各类繁重的、高精度、高风险的作业,于是,完成某些特定任务的机器——机器人逐步发展起来。移动式机器人需完成某些任务,其关键在于定位,即机器人必须知道自己现在的位置和将要“行走”的方位。根据机器人运用的环境不同,定位精度也大不相同,现有的定位技术大致可分为航迹推算、信号灯定位、基于地图的定位、路标定位以及视觉定位等几大类。
本文阐述的是一种运用多种传感器的航迹推算定位技术。该种定位方式适用于已知航线的行走,能够准确的从出发地快速行进到目的地,具有良好的嵌套性,可以成为某些大型定位系统的基本单元,同时具有抗干扰能力强、维护方便的特点。
1 系统总体设计
1.1 系统的总体结构
系统采用航迹推算原理对移动式机器人进行定位,航迹推算即利用外部传感器的数据实现机器人实时位置和运动方向的估计,短期定位精度高。航迹推算技术的关键是需测量出机器人单位时间运动的距离以及这段时间内机器人航向的变化。在本设计中,主要采用编码盘和陀螺仪进行航迹推算来实现定位,系统采用模块化设计,由驱动模块、传感器和反馈模块以及控制模块等组成,原理框图如图1所示。
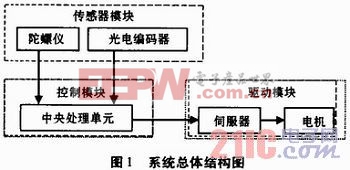
为提高抗干扰能力,系统各模块之间相互独立使用ISP串行通讯进行数据通信,每个模块都与控制系统构成一个闭环单元,控制系统通过算法整合,从而降低了各个单元之间的干扰和误差的累积。控制系统发出路线的整体行走方案,再由各个闭环单元检测是否按原定计划实施,当出现错误和误差时,系统通过采集的数据即刻做出实时调整,实现快速、准确定位。
1.2 系统的数学模型
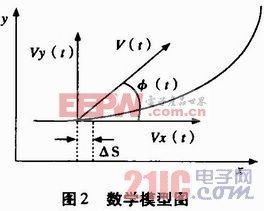
系统的数学模型可以看成是一个平面坐标定位,在平面内任何一个点的速度可以表示为线速度V和角速度V,其坐标为(x,y)。当一个物体在平面内从一点移动到另一点时,只要画出运动轨迹,就可以计算出在该轨迹上任一点的速度和坐标,以进行定位。假设某一运动轨迹方程已知,则需要按其轨迹进行运动定位,其数学模型如图2所示。










评论