基于红外反射式光电传感器的智能循迹小车

摘要:介绍了一种智能寻迹小车的设计与实现。基于红外反射式光电传感器的寻迹原理,采用AT89C52单片机为核心控制器件,通过红外传感器检测路面信息,单片机获取路面信息后,进行分析、处理,最后控制步进电机调节转向和转速。实验表明:该系统抗干扰能力强、电路结构简单,能够准确实现小车沿给定的黑线快速、平稳行驶。
关键词:AT89C52;反射式光电对管(RPR220);步进电机
智能汽车作为一种智能化的交通工具,体现了车辆工程、人工智能、自动控制、计算机等多个学科领域理论技术的交叉和综合,是未来汽车发展的趋势。寻迹小车可以看作是缩小化的智能汽车,它实现的基本功能是沿着指定轨道自动寻迹行驶。目前很多寻迹小车的路径识别方案使用CCD来实现,其优点是控制精细,前瞻距离远。但传感器CCD价格较高、体积较大、数据处理复杂,因此在按既定路线行走的自寻迹小车设计中,反射式光电传感器以其体积小、价格低、数据处理方便显得更有优势。
本文所述的智能寻迹小车采用红外光电传感器来识别道路中央的黑色引导线,通过单片机来控制步进电机调节转向和转速,从而实现小车快速稳定的寻迹行驶。为保证小车在行驶的过程中具有良好的操纵稳定性和平顺性,本文针对道路特点对小车的方向控制和速度控制,以及传感器的安装都提出了较为理想的解决方案。
1 系统工作原理
1.1 智能小车寻迹原理
在智能车系统中,寻迹电路采用红外光电传感器进行检测并且寻迹运动。红外发射管发射的红外线具有一定的方向性,当红外线照射到白色地面时会有较大的反射,如果距离取值合适,红外接收管接收到反射回的红外线强度就较大;如果红外线照射到黑色标志线,黑色标志线会吸收大部分红外光,红外接收管接收到红外线强度就很弱。寻迹时,引导线是黑颜色,不宜反光,当红外发射管输出信号照射到黑色引导线上时输出一个非常微弱的低电平,这个过程是一个负跳变过程,通过对此信号高低电平的检测就可以知道小车是正在沿着引导线行驶,若不是沿着引导线行驶,单片机根据传感器送回的信号可以判断并驱动电机正确转向,从而使小车沿着正确的轨道行驶。本系统在小车的前部朝地面方向安装了3个红外对管,分别为左、中和右。本系统使用传感器的型号为RPR220。
1.2 系统整体原理框图
智能小车由车架、电源、光电传感器、驱动电机和主控制系统等组成,如图1所示。智能车的工作过程是:3个光电传感器探测路径信息,并将这些信息输入到单片机控制系统,单片机进行分析,通过控制算法对驱动系统发出控制命令,驱动2个步进电机,使小车沿指定的黑线前进。
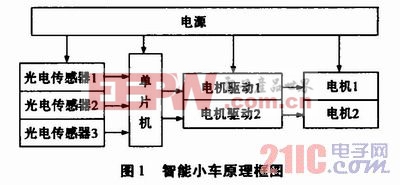
智能车的主控制器采用美国ATMEL公司生产的AT89C52。系统I/O口的具体分配如下:P2.0—P2.2共3位,用于小车前面路径识别的输入口;P1.0一P1.2用于驱动电路L297的半步/整步、正转/反转和刹停控制信号输出;P3.1用于驱动电路的时钟信号输出。
2 路面黑线检测电路
2.1 黑线检测电路
黑线检测电路共有3种方案,分别是图2的(a)、(b)、(c)3个图。图2(a)中:RPR220光电传感器应用时,理想的工作状态是输出部分处于饱和导通,查阅参数得到:UCES为0.1~0.3 V,此时IF=20 mA,IC=0.1 mA,二极管的导通电压大约为1 V,可以计算得到:
![]()
测试数据如表1:

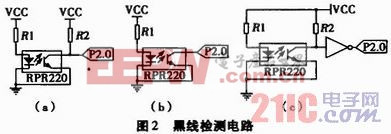
从表1可以看出,黑白相差的电压值最大时,离反射面的最佳距离为6 mm,距离的调节范围也比较大。然后将电路图2(a)的输出直接与单片机的P2.0口相连,此时,出现单片机接收码出错,分析得出:原因是单片机的P2.0口内部有自己的上拉电阻,所以出现低电平采不回去,为了克服此现象,改用图2(b)中,去掉电路原有的上拉电阻直接与单片机相连,但是出现距离局限的问题,即实验数据表明:只有距离为6 mm时,效果很好,但距离稍有波动,单片机就不能正常工作,因此,最后选用电路图2(c),在图2(a)的基础上输出端加一个非门再接到单片机。经过测试得到:此电路应用时,光电管距反射面的距离调节范围比较大,能够满足系统的要求。












评论