车载激光雷达低成本方案将加速无人驾驶到来

ADAS及无人驾驶系统中常用的环境传感器包括激光雷达、摄像头、毫米波雷达、超声波传感器、GPS这五类传感器或其中某几个的组合来实现自主移动功能。这五种传感器各具特征,各自有所侧重,一般在复杂系统中组合使用。相比于摄像头,激光雷达的最大优势在于使用环境限制较小,即不管在白天或是夜晚都能正常使用。对于标准车在雷达及毫米波雷达,当其所发射的电磁波在传播路径上遇到尺寸比波长小的物体时,将会发生衍射现象,即波的大部分能流绕过物体继续向前方传播,反射回来可供雷达接收的能量则很小,因此,无法探测大量存在的小型目标,即使是毫米波雷达,也探测不到直径很小的线状目标。而用于雷达系统的激光波长一般只有微米的量级,因而它能够探测非常微小的目标,测量精度也远远高于毫米波雷达及其他车载标准雷达。
本文引用地址:https://www.eepw.com.cn/article/201608/295480.htm激光雷达的缺点是在大雨大雪等恶劣天气中使用效果会受到影响,比如谷歌无人驾驶汽车从未在大雨大雪等恶劣条件下测试。激光雷达能够获得周边环境的点云数据模型,现在多用于在测量中有一定精度要求的领域,或需要测量自身与人体距离的智能装备,在测量与人的距离方面这一功能上尚无完美替代方案。
另外,激光雷达也存在着价格昂贵等劣势。激光雷达的测量精度与其雷达线束的多少有关,线束越多,测量精度越精准,ADAS无人驾驶系统的安全性也越高。但同时,线束越多,其价格也越昂贵。目前,虽然低成本化是激光雷达的一大趋势,但出于对驾驶安全性的考虑,高价激光雷达仍然占据主流。
4 “环境感知+导航定位”造就激光雷达的核心地位
LiDAR——Light Detection And Ranging,即激光雷达,是利用激光、全球定位系统GPS 和惯性测量装置(Inertial Measurement Unit,IMU)三者合一,获得数据并生成精确的数字高程模型(Digital Elevation Model,DEM)。简而言之,就是激光束探测目标的位置、速度等特征量的高精度雷达系统。原用于军事领域,目前已延伸至汽车无人驾驶领域。激光雷达(Lidar)和毫米波雷达(RADAR)的主要区别是激光雷达发射的是可见和近红外光波而毫米波雷达使用的是无线电波。
3D 激光雷达在无人驾驶运用中拥有两个核心作用。1)3D 建模进行环境感知。通过激光扫描可以得到汽车周围环境的3D 模型,运用相关算法比对上一帧和下一帧环境的变化可以较为容易的探测出周围的车辆和行人。2)SLAM 加强定位。3D 激光雷达另一大特性是同步建图(SLAM), 实时得到的全局地图通过和高精度地图中特征物的比对, 可以实现导航及加强车辆的定位精度。
车载激光雷达设备的主要成本花在 GPS/IMU 和 2D 激光扫描仪,约占总成本的 80%。1)车载激光雷达系统的优劣主要取决于 2D 激光扫描仪的性能。激光发射器线束的越多,每秒采集的云点就越多。然而线束越多也就代表着激光雷达的造价就更加昂贵,以Velodyne 的产品为例,64 线束的激光雷达价格是16 线束的10 倍。2)对于较高要求标准的 IMU,是基于光纤陀螺的技术制造的。其价格昂贵,大约在 150 万元左右。对于较低要求的 IMU,有许多厂家的设备可以选择,价格根据型号变化,在 10 万元到 50 万元之间。3)Velodyne 的车载激光雷达目前看来并没有加入IMU 部件。
目前行业对是否使用激光雷达仍然抱有争议,特斯拉的总裁Elon Musk 就公开表示无人驾驶并不需要激光雷达,将现有的传感器发挥的极致也能实现无人驾驶,而德尔福、丰田均已开始和激光雷达企业合作。激光雷达是否运用极大程度上取决于成本和效果,目前尚难以判断激光雷达未来的市场渗透率。如果低成本的激光雷达方案如能达到同样效果,将极大的推动无人驾驶进度,渗透率也会直线上升。麦肯锡认为无人驾驶解决方案成本达到2 万美金时,无人驾驶汽车将具备极大的商业价值。我们做一个大胆的假设: 2025 年,2000 美金的激光雷达被普遍认可,全球有5%左右的汽车成为无人驾驶或高度自动驾驶汽车,那么激光雷达的市场需求将达到110 亿美金。
5 车载激光雷达的产业格局和低成本发展趋势
目前,车载激光雷达的产品及生产厂商主要集中于国外,包括美国Velodyne公司、美国Quanegy公司以及德国IBEO公司等。国内的激光雷达产品主要以2D激光雷达为主,多用于地形测绘、建筑测量、家用服务机器人等领域。不过,国内以镭神智能、思岚科技等创业公司以及巨星科技、大族激光等上市公司为代表的企业也开始尝试逐步进入车用激光雷达行业。同时,由于目前昂贵的价格成为车用激光雷达市场推广的最大障碍,因此低成本化是其未来最主要的发展趋势。
5.1 国外企业破风而行,不断寻求技术突破
Velodyne: 车用激光雷达的行业先导
近年来,Velodyne的3D激光雷达业务发展迅猛,谷歌在其最早的自动驾驶原型汽车中所使用的LiDAR传感器就是由该公司开发的,其产品的测量精度在全行业领域内处于标杆地位,性能优越。Velodyne的3D激光雷达产品种类丰富,包括16线束、32线束及64线束等,其中还有专门为智能驾驶汽车设计的Ultra Puck激光雷达。
Google 采用的价值7.5 万美元的Velodyne HDL-64E 可以说是激光雷达中的劳斯莱斯,通过64 束的激光束进行垂直范围26.8 度,水平360 度的扫描,每秒能产生130 万的数据点。相比同类产品如Sick LaserRangefinde(价值6000 美金)每秒产生6000 个数据点,在量级上是不可同日耳语的。但Velodyne 产品相对测绘类的车载3D 激光雷达动辄几十万美金的价格,仍然是较为廉价的选择。
于2015年12 月10 日路测成功的百度无人驾驶汽车车身上,部署了毫米波雷达、视频等感应器,其车顶还安置了一个体积较大、价值70 万余人民币的64 位激光雷达(Velodyne HDL64-E)。能对本车周边半径70 米范围内的环境进行三维扫描,以3D 激光云点的方式呈现,给予自动驾驶汽车的智能决策系统提供周围环境最原始的判断依据。百度和Google 均致力于实现无人驾驶的最终阶段—— 完全自动驾驶。LiDAR 传感器的高精度扫描,适用于复杂环境探测,使得无人驾驶汽车可以在人车混杂的道路上无限接近“零事故”驾驶。
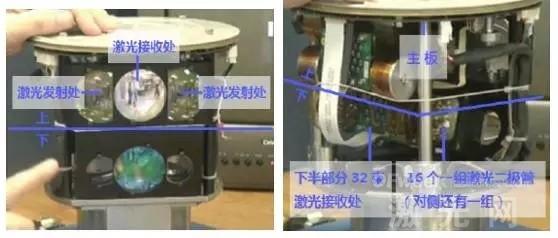
图2:HDL-64E正面和背面构造
观察Velodyne HDL-64E 的内部结构,主要由上下两部分组成。每部分都发射32 束的激光束,由两块16 束的激光发射器组成。背部是包括信号处理器和稳定装置。
在2016年1月的美国CES消费电子展上,Velodyne发布了其第一款汽车专用的3D激光雷达混合固态超级冰球(Solid-State Hybrid Ultra Puck Auto) ,这款产品为32线束激光雷达,体积小巧、便于汽车安装携带,同时价格低廉,未来在大规模量产的情况下,其目标价格可降至500美元,性价比较高。但这款激光雷达目前的版本只是车企测试版,而非最终供货版本,正式量产版本要到2018年才能面世。
Ultra Puck不仅在外形及价格成本上有较大突破,在专业技术上也有所改进。Velodyne对该款产品激光发射装置设置了2微秒时差,即32个激光发射器并非同时发射激光,而是以2微秒的时间间隔按顺序发射激光,这种设置可防止高发射率物体使激光雷达致盲,产品的性能得到提升。



评论