通过优化PWM算法提高智能微控制器控制性能解析方案

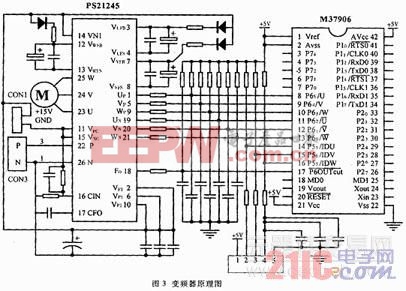
3 M37906微处理器和智能功率模块PS21245构成的变频器
M37906和PS21245智能功率模块构成的变频器结构如图3所示。其中IPM三相PWM控制信号通过4.7kΩ的上拉电阻后直接与M37906的P6相连(布线时要特别注意该组引线要尽可能短,以提高系统的抗干扰性能)。上臂驱动电源正极(VUFB、VVFB、 VWFB)和下臂驱动电源负极(VUFS、VVFS、VWFS)通过自举电路连到+15V,IPM的三个上臂控制电源端VP1和下臂控制电源端Vpc与+ 15V驱动电源直接相连。短路保护动作电压设定值CIN与VNC之间加限流电阻,根据实际保护动作电压的需要调整阻值。故障信号输出端Fo与M37906 的P6OUTcut/INT4相连。输出故障脉宽设定端CFO通过陶瓷电容与VNC相连,当选取22nF的电容时,对应的故障脉宽为1.8ms。IPM供电直流电源端P与+15V驱动电源连接。电源端N、上下臂GND端接模拟地。三相逆变输出端U、V、W与负载电机的U、V、W连接。
3.1 PWM采样方法[1]
PWM脉宽调制是利用相当于基波分量的信号对三角载波进行调制,脉冲宽度由正弦波和三角波自然相交而成的自然采样法,如图4所示。其中图4(a)为对称规则采术,设三角载波周期为Tt,采样周期为Ts(Ts=Tt),当以三角波顶点t1为采样点时:
ton=Ts/4(1+Usinωt1),toff=Ts/4(1-Usinωt1) (1)
tpw=Ts/2(1+Usinωt1)
采样点时刻t1只与载波比N有关,与调节器幅比M无关(其中t1=kT1,k=0,1,2,…N-1)。
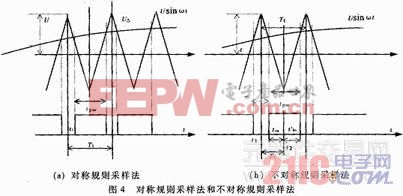
对于图4(b)所示的不对称规则采样法,既在三角波的顶点位置又在底点位置对正弦波进行采样时,采样周期Ts是三角波周期的1/2:
ton=Ts/2(1+Usinωt1)
toff=Ts/2(1-Usinωt1) (2)
ton=Ts/2(1+Usinωt2)
toff=Ts/2(1-Usinωt2)
脉冲宽度为:
tpw=ton+ton=Tt/2[1+U/2(sinωt1+sinωt2)]
t1=kTt/2(当k=0,2,4,6,…)
t2=kTt/2(当k=1,3,5,7,…)
其中k=0,1,2,3…,当k为偶数时是顶点采样,k为奇数时是底点采样。
3.2 软件结构


pwm相关文章:pwm原理











评论