通过优化PWM算法提高智能微控制器控制性能解析方案

联合使用定时器TA0~TA3和定时器TB0可以产生驱动三相马达的电压波形。M37906内部集成的三相马达驱动的工作方式答为三相波模式,用于实现三相波形的输出。三相正相波形(U相、V相、W相)和三相负相波形(UN相、VN相、WN相),分别从P65、P65、P64、P63、P62、P61和 P60输出,P6OUTcut/INT4作为智能模块的故障检测口。定时器TA3按定时方式工作,用于控制载波周期;定时器TA0~TA2按单次脉冲方式工作分别控制各输出相。其中定时器TA0控制W和WN相,定时器TA1控制V和VN相,定时器TA2控制U和UN相。
定时器TA3用于控制三角调制波或锯齿波的周期。当定时器TA3记数器向下溢出时,产生中断请求,发出一个短脉冲使定时器TA0~TA2开始记数;同时三相输出极性设置寄存器(00A8H)的相应位分别触发各自对应的输出极性设置翻转触发(toggle flipflop)器,设置其输出的极性,触发器的内容在定时器TA0~TA2触发时反向;定时器TA0~TA2在触发极性设置翻转触发器的同时也触发死区时间定时器使之开始工作。此时正相和负相输出波形并不能马上从高电平转到低电平,只有死区时间定时器溢出后,所发出的反向触发信号才使输出从高电平转到低电平。
在输出波形时,设置死区时间的目的是防止正向波形(U相、V相、W相)输出低电平和负相波形(UN 相、VN相、WN相)输出低电平时互相重叠,因为正相和负相同时为低电平时会造成驱动电路短路。M37906内部提供了3个以单次脉冲有方式工作的八位定时器完成对死区时间的控制。它们共用一个设定死区时间的重加载寄存器,在设定死区时间寄存器(00A7H)时也同时自动加载到共用的重加载寄存器中;每次触发死区时间定时器时微处理器会重新加载该寄存器中的值,按选择的记数源进行减记数;当记数器下溢时,记数器停止工作,等待下一次触发。
M37906 具有两种三相PWM方式,即三相PWM方式0和三相PWM方式1。在方式0中每次定时器TA3溢出都会产生中断请求;定时器TA0~TA2各使用一个寄存器,通过设定U、V、W各相的输出极性设置缓冲的方法使输出极性反向,也可以通过软件方法直接使三相输出反向。而三相波形方式1中定时器TA3每两次或每四次向下溢出才会产生中断;每个定时器交替使用两个寄存器,只能通过设置三相输出波形的极性寄存器实现三相波的极性设置;在每个周期内根据三相输出极性设置缓存器的内容由硬件自动完成的三相波极性的反向。
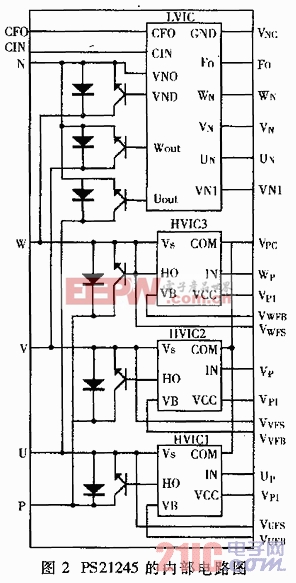
2 PS21245智能功率模块
DIP -IPM模块是日本三菱公司最新推出的第四代IPM智能功率模块。IPM智能功率模块是集内置三相交流输出IGBT逆变电路、高压驱动程序保护于一体的双列直插封装模块。其内部既有驱动控制和保护逻辑,又有过流、过(欠)压、短路和过热探测和保护电路,大大提高了变频器的可靠性和可维护性。DIP-IPM 模块与第三代IPM智能功率模块相比具有以下特点:只需一路+15V的驱动电路,可不采用光耦直接与单片机进行连接,工艺上采用了更小的 IGBT/FWDi芯片,使功耗更低、体积更小。PS21245的每路IGBT集电极电流为20A,开关频率典型值5kHz,绝缘耐压1500Vrms,集电极-发射极额定电压600V,其内部电路如图2所示。

pwm相关文章:pwm原理











评论