基于CAN总线的电动汽车数字控制系统研究

系统软件模块包括:控制策略模块、系统参数配置模块、运行监控及故障指示模块、CAN通信总线模块、数据采集模块、配置数据交换模块、报表打印模块、与其他软件的接口模块等。其中控制策略模块和CAN总线通信模块是主要的功能模块。
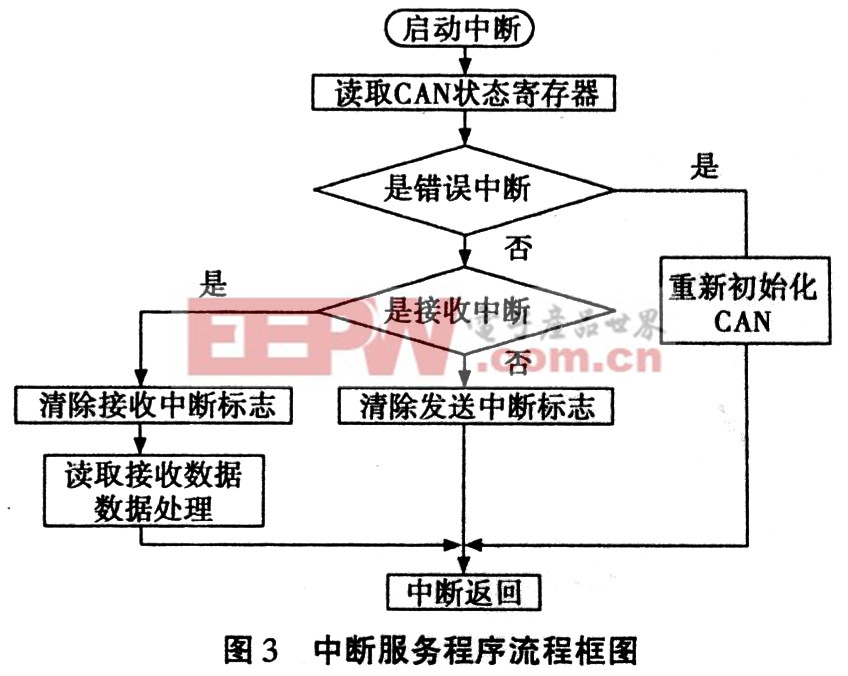
由于控制器是多变量输入,为了适应控制对象结构和参数变化范围大、对象数学模型难于建立的特点,控制策略模块采用了模糊控制方法。模糊控制的基础是知识库,当各个节点的信息通过CAN总线输入到控制器后,经过模糊推理和模糊决策获得输出量,可使整车获得最佳运行状态,实现电动汽车仪表显示及优化控制。CAN总线通信软件主要包括节点初始化程序、报文发送程序、报文接收程序以及CAN总线出错处理程序等。在初始化C8051F040内部寄存器时注意使得各节点的速率必须一致,而且收、发双方必须同步。报文的接收主要有中断和查询两种接收方式,为提高通信的实时性,保证接收缓存器不会出现数据溢出现象,本文设计的系统采用中断接收方式实现CAN的通信过程。中断服务程序流程图如图3所示。本文引用地址:https://www.eepw.com.cn/article/163824.htm
数据采集系统通过传感器、信号调理电路和采集卡,将表征电动汽车运行状况的物理量转化为数字量采集至各个CAN节点,在对数据位值转换、软件滤波和必要运算后,通过CAN总线将信息送往多能源控制器。CAN节点控制模
块需要采集的主要信号有:
1)动力装置的冷却系统:检测水温、油温、油压力、启动故障、水温过高/低等;
2)电机驱动控制系统:检测电压、电流扭矩、功率、转速、电机状态、车速、电机故障、加速踏板位置、制动踏板位置、离合器状态、钥匙信号、档位等;
3)电池管理系统:检测SOC、电池电压、电池电流、电池温度、电池充/放电、电池故障等。
现场总线控制系统以其高性能、高可靠性和高性价比,被越来越多地应用于车用电控单元和仪表系统之中。在电动汽车控制系统中采用CAN总线技术,不仅组网自由,扩展性强,实时性好,可靠性高,而且具有自诊断和监控能力,它是一种十分有效的通信方式。
5 结论
本文介绍了基于单片机C8051F040的CAN电动汽车数字控制系统设计过程,给出了硬件系统结构图和软件设计思路,经过实验证明,CAN电动汽车数字控制系统工作稳定、可靠,具有良好的应用前景。










评论