基于S3C44BOX芯片的单回路PlD控制器参数整定

3 单回路控制器PID控制算法
比例积分微分控制,是过程控制中应用最广泛的一种控制规律。实际运行经验及理论分析充分证明,这种控制规律用于多数被控对象能够获得较满意的控制效果。因此,在计算机测控系统中广泛地采用PID控制规律。
PID算法的离散化对被控对象的静态和动态特性的研究表明,由于绝大多数系统中存在储能部件,使系统对外作用有一定的惯性,这种惯性可以用时间常数来表征。另外,在能量和信息传输时还会因管道、长线等原因引入一些时间上的滞后。在工业生产过程的实时控制中,总是会存在外界的干扰和系统中各种参数的变化,它们将会使系统性能变差。为了改善系统性能,提高调节品质,除了按偏差的比例调节以外,引入偏差的积分,以克服余差,提高精度,加强对系统参数变化的适应能力:引入偏差的微分来克服惯性滞后,提高抗干扰能力和系统的稳定性,由此构成的单参数PID控制回路
e(t)=R-y(t) (1)
式(1)中y(t)是被控变量,R是y(t)的设定值。e(t)是调节器的输入偏差,后面将见到的u(t)是调节器输出的控制量,计算机测控系统通常利用采样方式实现对生产过程的各个回路进行巡回检测和控制,它属于采样调节。
设计中的单回路控制器采用的数字PID算法由软件实现,所谓PID控制就是按设定值与测量值之间偏差的比例、偏差的积累和偏差变化的趋势讲行控制。它根据采样时刻的偏差值计算控制量。因此PID控制律的实现,必须用数值逼近法。当采样周期相当短时,可以用求和代替积分,用差商代替微分,即作如下近似变换:
式(2)中,k——采样序号,k=1,2…,T——采样周期。
显然,上述离散化过程中,采样时间必须足够短,才能保证有足够的精度。为了书写方便,将e(kT)简化表示成e(k)等,即省去T。可以得到离散的PID表达式为:
式中,k——采样序号,k=0,1,2……;u(k)——第k次采样时刻的计算机输出值;e(k)——第k次采样时刻输入的偏差值;e(k-1)——第k-1次采样时刻输入的偏差值;KI——积分系数,
该系统采用的是增量式PID控制算法,即指数字控制器输出只是控制量的增量△u(k),该算法的优点是编程简单,数据可以递推使用,占用存储空间少,运算快。
根据递推原理可得
4 仿真说明
事先给定系统中的传递函数
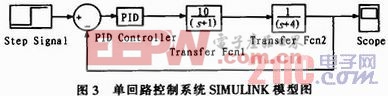
该系统要做的仿真验证是:采用ARM7S3C44BOX芯片进行PID参数整定要比采用普通的89C51单片机芯片进行PID参数整定的效果好。在单回路控制系统的输入端输入一个阶跃信号,在示波器中得到的仿真图如图4、5所示。
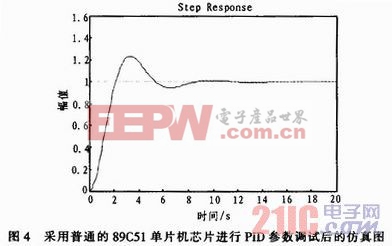
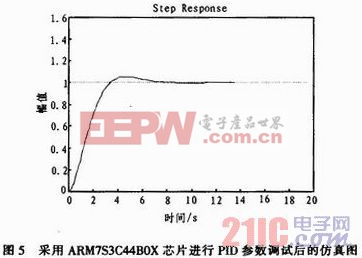
可以明显的看到,图4所示的仿真曲线,系统的动态偏差过大,稳定性不是很好。图5所示的仿真曲线,过渡过程非常平稳,超调量不大,曲线的波动不大,稳定性好。
5 结论
单回路控制系统是最基本,结构最简单的一种控制系统。但它是生产过程中应用最为广泛的一种控制系统。因此,这种简捷方便的参数整定方法具有一定的实用性。本文采用ARM7S3C44BOX芯片进行单回路PID参数调试,与89C51单片机芯片相比较,体现出强大的数据处理功能,过渡过程非常平稳,在控制上达到了平稳、迅速、准确跟踪设定值的要求,控制效果良好。














评论