智能车高速稳定行驶局部路径规划算法

两段外切圆弧目标转向半径的确定
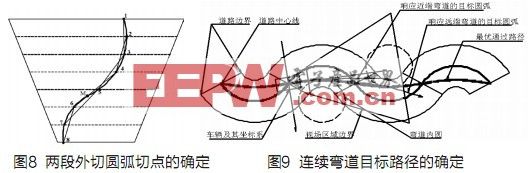
本文引用地址:https://www.eepw.com.cn/article/109143.htm当两段圆弧外切连接,可采用“弦线法”确定两段圆弧的切点,如图8,将圆弧平分为7段,分别连线13,24,35,46,57,68,则有一条弦线与圆弧相交,若没有找到交点或找到多个交点,可将圆弧平分为更多段数进行连线,直到仅找到一个交点为止,近似认为该交点即为切点。将切点作为两段圆弧的公用特征点,再分别从两段圆弧上各提取两点作为特征点,按照一段圆弧圆心位置的计算方法,可分别求出两段圆弧的圆心位置和半径,进而可分别计算出响应远端圆弧的目标转向半径Rf和响应近端圆弧的目标转向半径Rn,如图9。若响应远端圆弧的目标圆弧与响应近端圆弧的目标圆弧弯曲方向相反,则选取Rf为目标半径;否则,即两者弯曲方向相同时,当Rf ≤Rn时,为保证响应近端弯道时不触及道路边界,选取Rn为目标半径,当Rf>Rn时,选取Rf为目标半径。由此可在连续弯道中规划出一条近似最优的通过路径。
舵机转角和行驶速度的确定
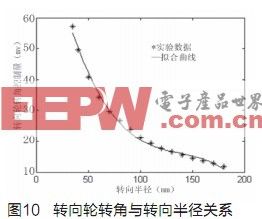
当智能车行驶速度较高且侧向加速度剧烈变化时,容易出现侧向附着力不足以提供车辆所需的侧向力的情况。这种情况发生在前轮,会造成前轮失去转向能力;发生在后轮,则会造成后轮侧滑甚至激转。由于在智能车实际行驶过程中发生侧滑现象较多,故通过定圆周实验可确定智能车在一系列不同转向半径下确保智能车不发生侧滑的转向轮转角及最高稳定速度,并拟合出转向轮转角与转向半径及最高稳定速度与转向半径之间的关系曲线,如图10、11。因此,在智能车行驶过程中通过路径规划计算出目标转向半径后,可通过查表确定期望的转向轮转角及最高稳定速度,并通过PID控制器对舵机和电机进行控制。
智能车及无线传输模块试验平台
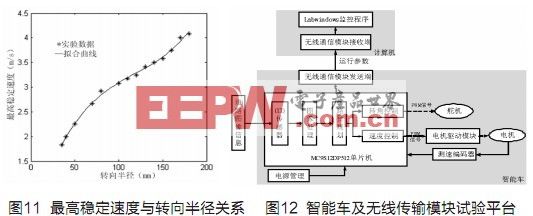
为实时监视智能车运行参数,搭建智能车及无线传输模块硬件试验平台如图12。试验平台由智能车和计算机两部分组成,智能车是试验平台的主体,计算机通过虚拟仪器语言Labwindows开发的监控程序实现试验数据的监控及显示,两者之间通过无线通信模块进行数据实时传输。其中,智能车部分包括:①传感器单元,由CCD传感器,测速编码器组成;②MC9S12DP512单片机,为智能车的控制器;③电源管理单元,为智能车各工作单元提供能源;④动作执行单元,由电机驱动模块、电机及舵机组成⑤无线通信模块发射端。计算机部分主要由Labwindows监控程序及无线模块接收端组成。
实验结果与比较
为验证算法有效性,搭建实验道路如图13,分别使智能车采用传统的跟踪道路中心线循迹控制算法和采用路径规划算法由起点开始各逆时针方向行驶一周,两者皆根据上文中标定实验分配转向轮转向角和车速,并在行驶过程中通过无线传输模块发送其转向轮转角及实时车速,并通过计算机拟合出转向轮转角对比曲线如图14,车速对比曲线如图15。实验结果表明,在不触及道路边界的前提下,相比传统的跟踪道路中心线循迹控制算法,通过局部路径规划算法可以使智能车在复杂的行驶道路中平均车速提高大约40%,缩短了智能车的行驶时间;转向轮转角的绝对值总体上减小大约50%,降低了侧向加速度剧烈变化危险工况发生的几率,提高了智能车的高速行驶稳定性。










评论