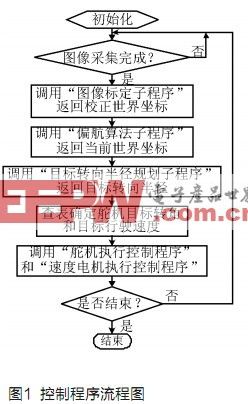
- 提出一种确保智能车高速稳定行驶的局部路径规划算法。利用CCD传感器采集道路图像信息,综合考虑智能车相对道路的位置和姿态,弯道类型等,完成CCD传感器图像标定、偏航计算和路径规划,进而试验标定目标转向半径与避免侧滑的最高车速的关系以及目标转向半径与转向角的关系,最终查表输出确保智能车高速稳定行驶的车速与转向角。试验结果表明:本算法能确保智能车以较高车速稳定行驶通过规定路径。
- 关键字:
智能车 传感器 局部路径规划 高速 稳定 201005
局部路径规划介绍
您好,目前还没有人创建词条局部路径规划!
欢迎您创建该词条,阐述对局部路径规划的理解,并与今后在此搜索局部路径规划的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473