智能车高速稳定行驶局部路径规划算法

基于坐标变换的偏航算法
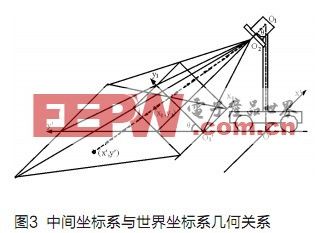
由于从CCD传感器采集图像开始到单片机输出控制量结束经历一定程序执行时间,在这段时间内,智能车行驶一定距离并转过一定角度,故为了针对当前时刻智能车相对道路的位置及姿态输出控制量,需将道路中心线各点坐标进行坐标转换,如图4。
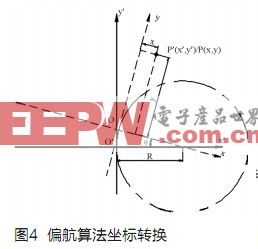
由车速,转向半径及程序执行时间可求出智能车世界坐标系在程序执行时间内所转过的角度为:
式中ω为智能车瞬时角速度,t为程序执行时间,V为智能车行驶速度,R为转向半径。
故新坐标系的两坐标轴在原坐标系内方程分别为:
利用点到直线距离公式,可求出任意一点P'(x',y')坐标转换后的新坐标P(x,y)。










评论