自动控制系统的设计--PID校正

6.5.1 PID控制器工作原理
 |
| 图6-26 |
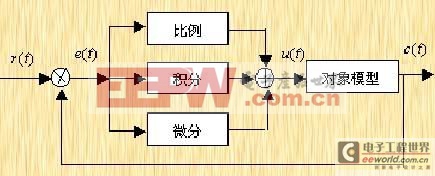
典型PID电原理图如图6-11(b)中的有源迟后-超前校正装置,图6—26 则为它的控制结构框图。
由图6—26可见,PID控制器是通加对误差信号e(t)进行比例、积分和微分运算,其结果的加权,得到控制器的输出u(t),该值就是控制对象的控制值。PID控制器的数学描述为:
 |
|
式中u(t)为控制输入,e(t)=r(t)-c(t)为误差信号,γ(t)为输入量,c(t)为输出量。
下面对PID中常用的比例P、比例-积分PI、比例-微分PD和比例-积分-微分PID四种调节器作一简要分析,从而对比例、微分和积分作用有一个初步的认识。
(一)比例调节器—比例的作用
比例调节器的传递函数Gc(S)=Kp,u(t)=Kp·e(t),即在PID控制器中使Ti→∞,
Td→0 。
根据前面所学,为了提高系统的静态性能指标













评论