自动控制系统的设计--PID校正
以一个三阶系统为例。
一单位反馈系统的开环传递函数为:![]() ,其根轨迹如图6—27,当
,其根轨迹如图6—27,当 ![]() 时,系统将产生振荡。同时从图6—28闭环响应曲线也可以发现,当
时,系统将产生振荡。同时从图6—28闭环响应曲线也可以发现,当 ![]() 增大时,系统稳态输出增大,系统响应速度和超调量也增大,
增大时,系统稳态输出增大,系统响应速度和超调量也增大, ![]() 时,系统产生等幅振荡,已不稳定。可见,单纯采用
时,系统产生等幅振荡,已不稳定。可见,单纯采用 ![]() 来改善系统的性能指标是不合适的。
来改善系统的性能指标是不合适的。
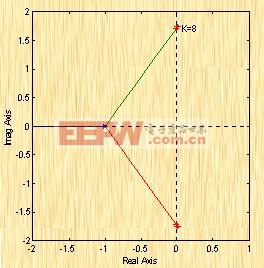 |
| 图6-27 |
相关推荐技术专区 |
以一个三阶系统为例。
一单位反馈系统的开环传递函数为:![]() ,其根轨迹如图6—27,当
,其根轨迹如图6—27,当 ![]() 时,系统将产生振荡。同时从图6—28闭环响应曲线也可以发现,当
时,系统将产生振荡。同时从图6—28闭环响应曲线也可以发现,当 ![]() 增大时,系统稳态输出增大,系统响应速度和超调量也增大,
增大时,系统稳态输出增大,系统响应速度和超调量也增大, ![]() 时,系统产生等幅振荡,已不稳定。可见,单纯采用
时,系统产生等幅振荡,已不稳定。可见,单纯采用 ![]() 来改善系统的性能指标是不合适的。
来改善系统的性能指标是不合适的。
|
| 图6-27 |
相关推荐技术专区 |















评论