自动控制系统的设计--PID校正
cd=[Td/N(i),1,0]; Gc=tf(mn,cd);
G_c=feedback(G*Gc,1);
step(G_c)
end
axis([0,20,0,2])
6.5.2 Zieloger-Niclosls整定公式
Zieloger-Niclosls整定公式是一种针对带有时延环节的一阶系统而提出的实用经验公式。此时,可将系统设定为如下形式:
|
在实际的控制系统中,大量的系统可用此模型近似,尤其对于一些无法用机理方法进行建模的系统,可用时域法和频域法对模型参数进行整定。
(一)基于时域响应曲线的整定
基于时域响应的PID参数整定方法有两种。
第一法:设想对被控对象(开环系统)施加一个阶跃信号,通过实验方法,测出其响应信号,如图6-31,则输出信号可由图中的形状近似确定参数k,L和T(或α),其中
α=kL/T。如果获得了参数k,L和T(或α)后,则可根据表6-1确定PID控制器的有关参数。
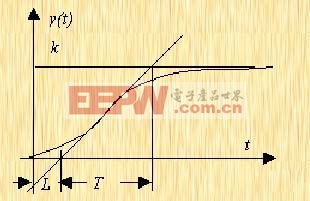 |
图6-31 一阶时延系统阶跃响应 |

相关推荐技术专区 |














评论