自动控制系统的设计--基于根轨迹的串联校正设计
与频域法相似,利用根轨迹法进行系统的设计也有两种方法:1)常规方法;2)Matlab方法。Matlab的根轨迹方法允许进行可视化设计,具有操作简单、界面直观、交互性好、设计效率高等优点。目前常用的Matlab设计方法有:1)直接编程法;2)Matlab控制工具箱提供的强大的Rltool工具;3)第三方提供的应用程序,如CTRLLAB等。本节在给出根轨迹的设计思路的基础上,将重点介绍第一、二种方法。 6.4.1 超前校正
关于超前校正装置的用途,在频率校正法中已进行了较详细的叙述,在此不再重复。 利用根轨迹法对系统进行超前校正的基本前提是:假设校正后的控制系统有一对闭环主导极点,这样系统的动态性能就可以近似地用这对主导极点所描述的二阶系统来表征。因此在设计校正装置之前,必须先把系统时域性能的指标转化为一对希望的闭环主导极点。通过校正装置的引入,使校正后的系统工作在这对希望的闭环主导极点处,而闭环系统的其它极点或靠近某一个闭环零点,或远离s平面的虚轴,使它们对校正后系统动态性能的影响最小。 是否采用超前校正可以按如下方法进行简单判断:若希望的闭环主导极点位于校正前系统根轨迹的左方时,宜用超前校正,即利用超前校正网络产生的相位超前角,使校正前系统的根轨迹向左倾斜,并通过希望的闭环主导极点。 (一)根轨迹超前校正原理
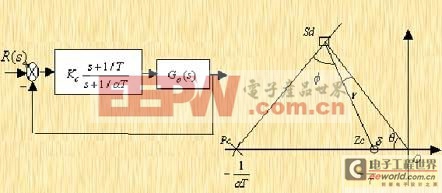
设一个单位反馈系统,G0(s)为系统的不变部分,Gc(s)为待设计的超前校正装置,
Kc为附加放大器的增益。绘制G0(s)的根轨迹于图6—19上,设点Sd 为系统希望的闭环极点,则 若为校正后系统根轨迹上的一点,必须满足根轨迹的相角条件,即
∠Gc(Sd)G0(Sd)=∠Gc(Sd)+G0(Sd)=-π
于是得超前校正装置提供的超前角为: 显然在Sd已知的情况下,这样的Gc(s)是存在的,但它的零点和极点的组合并不唯一,这相当于张开一定角度的剪刀,以Sd为中心在摆动。若确定了Zc和Pc的位置,即确定了校正装置的参数。下面介绍三种用于确定超前校正网络零点和极点的方法。 (二)三种确定超前校正装置参数的方法
零极点抵消法 在控制工程实践中,通常把Gc(s)的零点设置在正对希望闭环极点Sd下方的负实轴上,或位于紧靠坐标原点的两个实极点的左方,此法一般可使校正后系统的期望闭环极点成为主导极点。 比值α最大化法 能使超前校正网络零点和极点的比值α为最大的设计方法。按照该法去设计Gc(s)的零点和极点,能使附加放大器的增益尽可能地小。 以图6—19上的点O和Sd,以Sd为顶点,线段O 为边,向左作角γ,角γ的另一边与负实轴的交点Zc=-1/T,点Zc就是所求 的一个零点。再以线段ZcSd为边,向左作角
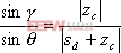
∠PcSdZc,该角的另一边与负实轴的交点Pc=-1/αT,点 就是所求Gc(s)的一个极点。根据正弦定理,由图6—18求得: 于是有: 将夹角γ作为自变量,式(6—24)对γ求导,并令其等于零,即dα/dγ=0
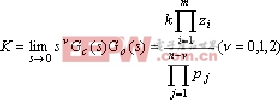
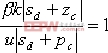
由上式解得对应于最大α值时的γ角为 不难看出,当希望的闭环极点Sd被确定后,式(6—25)中的θ和φ均为已知值,因而由上式可求得γ角,然后由式(6-22)和式(6-23)求得相应的零极点。 幅值确定法 设系统的开环传递函数: 且令超前校正装置的传递函数: 若要求校正后系统的稳态误差系数K(Kp,Kv,Ka),则由上式可首先确定k: 在开环增益k确定后,根据根轨迹原理,若Sd为校正后的闭环极点,则它除必须满足相角条件外,还应满足幅值条件: | 上式中, |  |
同样根据平面三角形原理,对于△ZcOSd有: |
|








评论