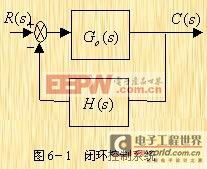
如前所述,一个单输入单输出的控制系统一般可化为图6-1的形式,G0(s)是控制系统的不可变部分,即被控对象,H(s)为反馈环节。未校正前,系统不一定能达到理想的控制要求,因此有必要根据希望的性能要求进行重新设计。在进行系统设计时,应考虑如下几个方面的问题: (1) 综合考虑控制系统的经济指标和技术指标,这是在系统设计中必须要考虑的。 (2) 控制系统结构的选择。对单输入、单输出系统,一般有四种结构可供选择:前馈校正、串联校正、反馈校正和复合校正,其框图如图6-2。考虑到串联校正比较经济,易于实现,且设计简单,在实际应用中大多采用此校正方法,因此本章只讨论串联校正,典型的校正装置有超前校正、滞后校正、滞后-超前校正和PID校正等装置。 (3) 控制器或校正装置的选择。校正装置的物理器件可以有电气的、机械的、液压的和气动的等形式,选择的一般原则是根据系统本身结构的特点、信号的性质和设计者的经验,并综合经济指标和技术指标进行选择。本书我们以电气校正装置作为控制器,详述有源和无源装置的工作原理和设计方法。其思想方法同样适用于其它类型的校正装置设计。 (4) 校正手段或校正方法的选择。究竟采用时域还是频域方法,须根据控制系统性能指标的表达方式选择。控制系统的性能指标通常包括动态和静态两个方面。动态性能指标用于反应控制系统的瞬态响应情况,它一般可用时域性能指标和频域指标两个方面:1)时域性能指标:调整时间ts 、上升时间tr 、峰值时间tp 和最大超调量
Mp等;2)频域性能指标:开环指标包括相位裕量γ 、增益裕量Ag ;闭环指标包括谐振峰值Mr 、谐振频率ωr 和频带宽度ωb等。 在进行系统设计时,若所使用的指标是时域指标,则一般宜用根轨迹法进行设计,使闭环系统的极点重新配置;若所使用的指标是频域指标,宜用频率法(如伯德图或极坐标)进行设计。 最后需要指出,由于电子技术和计算机技术的发展,目前实际系统中大量采用的控制器是有源校正装置,如典型的PID调节器,但正如下文大家将看到的,无源校正与有源校正尽管组成形式有差别,但它们的工作原理是相同的。
|
|
pid控制器相关文章:pid控制器原理









评论