自动控制系统的设计--PID校正
解:由于系统开环中存在积分环节,无法采用第一法。因而采用Zieloger-Niclosls整定公式第二法。
(1) 首先,令![]() ,则闭环系统的传递函数为:
,则闭环系统的传递函数为:

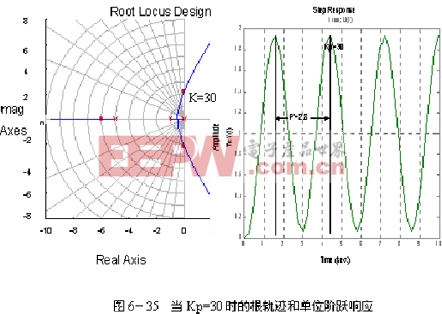
通过Ruth判据容易得到当![]() 时,闭环系统产生持续等幅振荡。使用Matlab中rltool命令,并增加极点:
时,闭环系统产生持续等幅振荡。使用Matlab中rltool命令,并增加极点: ![]() 在根轨迹与虚轴交界处点击可得到同样结果。如图6-35。
在根轨迹与虚轴交界处点击可得到同样结果。如图6-35。
 |
(2) 根据Z-N第二整定法,即可分别得到PI和PID控制器的参数:
(A)PI控制器:![]() 。
。
![]()
(B) PID控制器:
![]()
解:由于系统开环中存在积分环节,无法采用第一法。因而采用Zieloger-Niclosls整定公式第二法。
(1) 首先,令![]() ,则闭环系统的传递函数为:
,则闭环系统的传递函数为:
通过Ruth判据容易得到当![]() 时,闭环系统产生持续等幅振荡。使用Matlab中rltool命令,并增加极点:
时,闭环系统产生持续等幅振荡。使用Matlab中rltool命令,并增加极点: ![]() 在根轨迹与虚轴交界处点击可得到同样结果。如图6-35。
在根轨迹与虚轴交界处点击可得到同样结果。如图6-35。
|
(2) 根据Z-N第二整定法,即可分别得到PI和PID控制器的参数:
(A)PI控制器:![]() 。
。
![]()
(B) PID控制器:
![]()















评论