混合动力电动汽车系统电路解析 —电路图天天读(237)

近几十年来,资源短缺和环境保护成为世界汽车工业面临的两大挑战。石油资源短缺,汽车尾气对大气的污染日趋严重,因此,各国汽车工业都加大了研究和开发其它燃料汽车和电动汽车的力度。
本文引用地址:https://www.eepw.com.cn/article/201710/368340.htm1 混合动力电动汽车系统结构
图1为串联式混合动力系统拓扑结构图,整个混合动力系统采用串联式结构,主要由能源供给系统、电气驱动系统和机械传动系统三大部分构成。能源供给系统由动力电池组、发动机-发电机机组组成;电气驱动系统由逆变器和电动机组成;机械传动系统将电动机的机械输出通过减速器送给驱动桥。整车系统采用can总线传输信息和命令,通讯介质采用屏蔽双绞线。
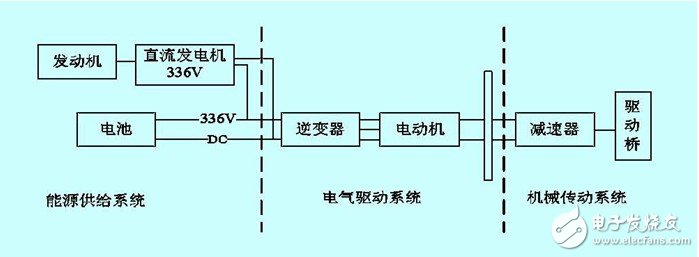
图1 串联式混合动力系统拓扑结构图
2 电机驱动系统主电路结构
2.1 主回路元件选择
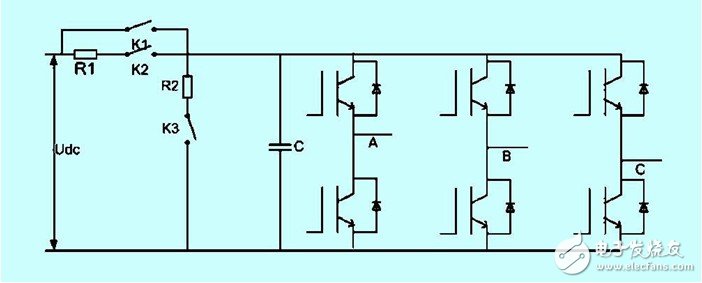
图2 驱动系统主回路电路图
电机驱动系统主回路原理如图2所示,采用三相桥式逆变器,根据牵引电机的参数:额定功率50kw; 额定电流167a; 额定电压240v;额定频率200hz; 峰值频率400hz。功率器件可选600v/600a,开关频率10khz。
直流侧支撑电容采用4个3300μf的电解电容并联而成,并联在高压直流母线两端。由于直流侧电压udc=336v,所以支撑电容的耐压等级应高于336v,取450v。
3 控制电路
3.1 驱动系统控制部分设计
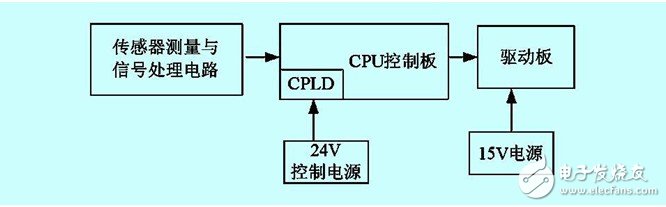
图3 电机驱动系统控制框图
图3为电机驱动系统控制框图,它由传感器测量与信号处理电路、控制板以及驱动板等组成。
电机控制电路分为电机电压控制电路 ( 功率放大电路和 H 型双极驱动电路 ) 和 P W M 脉宽调制电路 。抗干扰电路和过 、 欠电压检测与保护电路已分别嵌入到了电机电压控制电路和 P W M 脉宽调制电路两大模块内 。
P WM脉宽调制电路
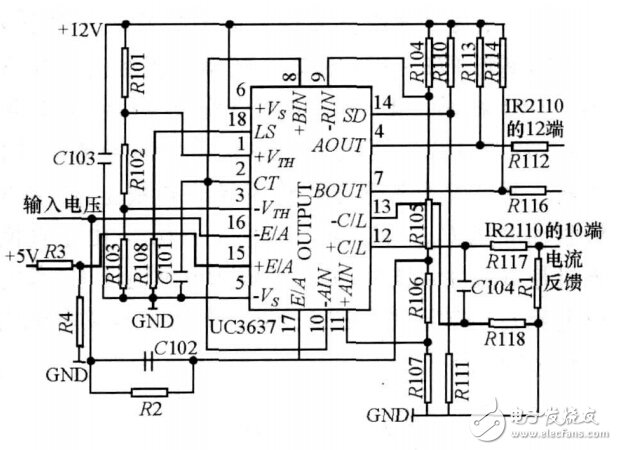
图 4 P W M脉宽调制电路原理图
设计依据如下 : U C 3 637 的控制电压 ( 16 端 ) 在± 5V 变化时 , 经 U C 3 637 内部比例放大器处理后的电压( 即引脚 9、1 1两端 ) 在 2 ~ 8V 之间变化且线性较好 。
3. 2 H 型双极功率电路
H 型双极功率电路原理图如图 5 所示 。它由 4个大功率管 V T 1 ~ V T 4 和 2 个新型双极续流二极管D V 1、D V 2 构成 。
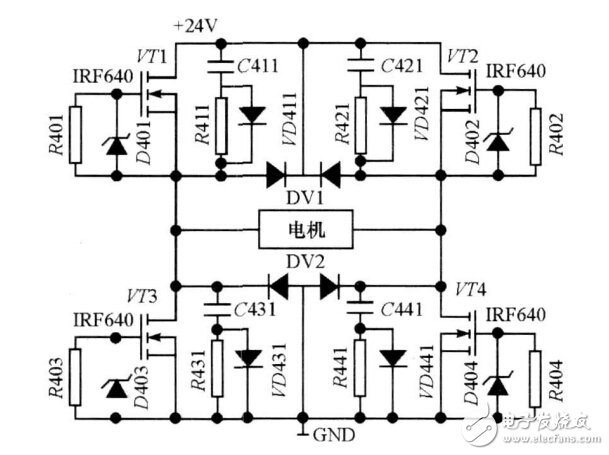
图 5 H型双极功率电路原理图
3. 3 I R 21 10功率放大电路设计
依据大功率管 I R F 6 40容量较小 , 承受反压能力较低的优点 , 采用 4 个大功率管作为功率驱动电路开关元件,同时用 2 个 I R 21 10作为基极驱动器对称地驱动每侧大功率管 I R F 6 40, 如图 6 所示。图 6 是左侧 I R 2110 功率放大电路原理图 。
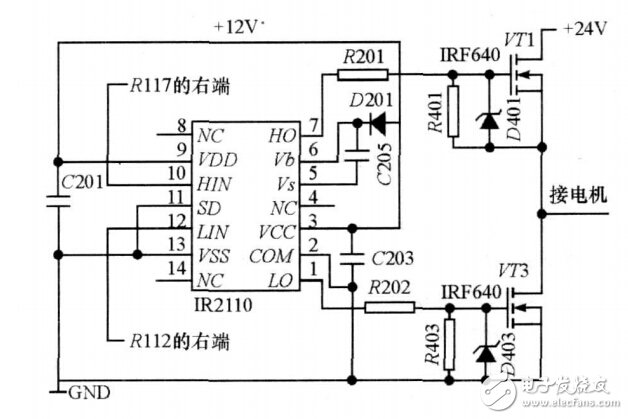
图 6 左侧 I R 211 0 功率放大电路原理图
I R 2110 功率放大电路主要由电容 C 205 和二极管 D 201 构成 的自举 电路 来实现 功率 驱动 。因此I R 2110 功率放大电路参数设计重点是自举电容和自举二极管的选取 。
4 电机的工作原理
控制电路性能可通过检测电机的性能好坏来评价 。电机的性能试验通过混合动力电动汽车系统来实现 , 如图 7中的虚线框所示 。 混合动力电动汽车系统控制方案为 : 和电机控制电压相对应的转速 n 1与转速传感器反馈转速 n 2 之差的电压信号 , 经 P I D外环控制器后与角位移传感器反馈的角位移信号合成且经内环 P I 控制器后形成控制电压 , 来控制电机转动某个角度 θ , 最后经发动机输出转速 n 。
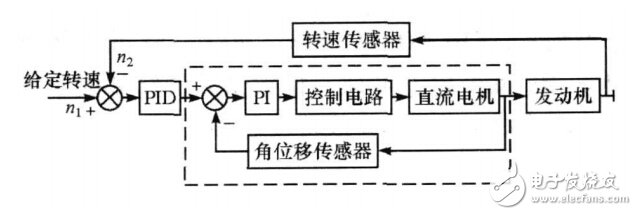
图 7 混合动力电动汽车系统控制方案图
编辑点评:本文设计了一种新型混合动力电动汽车的电机控制电路, 控制电路由电机电压控制电路和 P W M脉宽调制电路构成 。利用所设计的电机控制电路 , 进行了电机的线性度和助动转矩等性能试验 。
电子发烧友《无线通信特刊》,更多优质内容,马上下载阅览











评论