前馈-改进PID算法在智能车控制上的应用

1 引言
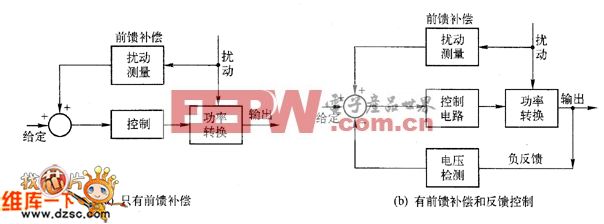
智能车系统是一个时变且非线性的系统,采用传统PID算法的单一的反馈控制会使系统存在不同程度的超调和振荡现象,无法得到理想的控制效果。本文将前馈控制引入到了智能车系统的控制中,有效地改善了系统的实时性,提高了系统的反应速度[1];并且根据智能车系统的特点,对数字PID算法进行了改进,引入了微分先行和不完全微分环节,改善了系统的动态特性;同时,利用模糊控制具有对参数变化不敏感和鲁棒性强的特点[2],本文将模糊算法与PID算法相结合,有效地提高了智能车的适应性和鲁棒性,改善了系统的控制性能。
2 改进PID算法
智能车的控制是由飞思卡尔公司的S12芯片完成,所以对智能车的控制要采用计算机控制方法。本文针对智能车控制的特殊性,对传统数字PID算法做了一些改进,这样可以更好地满足智能车控制的需要。
2.1不完全微分PID
将微分环节引入智能车的方向和速度控制,明显地改善了系统的动态性能,但对于误差干扰突变也特别敏感,对系统的稳定性有一定的不良影响。为了克服上述缺点,本文在PID算法中加入了一阶惯性环节[3] ,不完全微分PID算法结构如图1所示。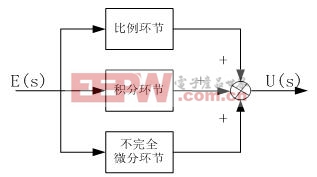
图1 不完全微分PID算法机构图
将一阶惯性环节直接加到微分环节上,可得到系统的传递函数为: (1)
(1)
将(1)式的微分项推导并整理,得到方程如下: (2)
(2)
式中, ,由系统的时间常数 和一阶惯性环节时间常数 决定的一个常数。
为了编程方便,可以将2-2式写成如下形式:
 (3)
(3)
式中, 。
。
分析式(3)可知,引入不完全微分以后,微分输出在第一个采样周期内被减少了,此后又按照一定比例衰减[3][4]。实验表明,不完全微分有效克服了智能车的偏差干扰给速度控制带来的不良影响,具有较好的控制效果。图2为不完全微分PID算法的程序流程图。
2.2 微分先行PID
由于智能车在跑道上行驶时,经常会遇到转弯的情况,所以智能车的速度设定值和方向设定值都会发生频繁的变化,从而造成系统的振荡。为了解决设定值的频繁变化给系统带来的不良影响,本文在智能车的速度和方向控制上引入了微分先行PID算法,其特点是只对输出量进行微分,即只对速度测量值和舵机偏转量进行微分,而不对速度和方向的设定值进行微分。这样,在设定值发生变化时,输出量并不会改变,而被控量的变化相对是比较缓和的,这就很好地避免了设定值的频繁变化给系统造成的振荡,明显地改善了系统的动态性能。
图3是微分先行PID控制的结构图,微分先行的增量控制算式如下。 (4)
(4)
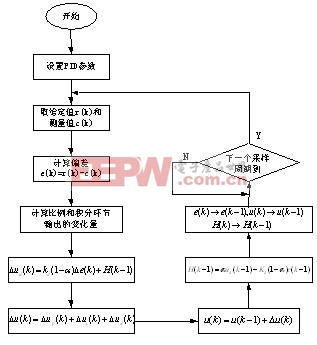
图2 不完全微分PID算法的程序流程图









评论