CAN总线在车辆分布式控制系统中的应用

1 引言
对于多电机的系统,特别是多电机驱动的轨道车辆控制系统,需要实现大量的信息采集、分布式的协调控制、实时的反应速度等功能。传统的集散型控制系统存在系统不开放、硬件投资大、布线复杂、维修不便的缺点,具有明显的局限性,显然是不适合的。现场总线控制系统(FCS)是继直接数字控制(DDC)、集散控制系统(DCS)之后的一种新型的控制系统,是一种全开放、全数字、多点通信的底层控制网络,具有全分散性控的体系结构。其显著特点是通过开放性总线把现场设备连接成网络,各智能设备能够完成自动控制和运行状态的自行诊断,并且能够通过总线实现设备之间的通信,从而简化了系统结构,提高了可靠性。因此本文提出了一种基于CAN(Controller Area Network)总线控制系统的设计方案,将计算机通讯、现场总线技术很好的结合起来,设计出了一套结构简单、实时性高、扩展性强的分布式监控系统,实现了多电机控制与监测的实时调节、设备状态的数字化和图形化显示。
2 控制系统整体方案设计
整个控制系统由监控计算机、PC-CAN接口卡、操作台节点、智能驱动节点(n110)、CAN总线网络组成,其系统结构如图1所示。分布在整个车辆的驱动节点接收操作台发来的控制指令,对驱动电机进行智能控制,并采集车载电源的电压、电流和温度信号,经过处理后发送给监控计算机;监控计算机可以通过CAN总线网和各个控制节点之间进行实时通信,并显示电源电压、驱动电流、车辆速度等状态,从而实现轨道车辆的分布式驱动和集中监控。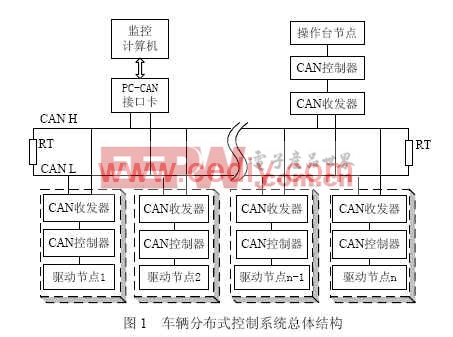
控制系统中的驱动节点由微处理器、CAN控制器、CAN收发器和外围电路(如:信号调理、光耦隔离、I2C、拨码开关等)组成。监控计算机可以选用普通PC或工控机IPC。PC-CAN适配卡用来完成CAN总线和监控计算机之间的协议转换,可以选用PCI总线适配卡、ISA总线适配卡或RS232串行通信适配器。操作台节点用于车辆运行方向与运行速度的控制。各个控制节点之间通过屏蔽双绞线互联构成CAN总线网络,总线两端连接120Ω的阻抗匹配电阻,用来提高系统的稳定性、增强系统的抗干扰能力。
3 驱动节点的硬件设计
CAN总线器件有两种选择方案:一种是片内集成CAN的微控制器,如P8XC591/2、87C196CA/CB、MC68376等;另一种是独立的CAN控制器,如控制Philips公司的SJA1000、82C200、 Intel公司的82526、以及Microchip公司的MCP2510等,但是独立的CAN控制芯片需要外接一个微处理器才能运行。为了简化设计,提高可靠性,本文设计中选用的是Philips公司的带有在片CAN控制器的P87C591微型控制器,自带CAN总线控制器(SJA1000)的微处理器,不占用处理器的端口资源,大大简化了接口电路的设计,减少了程序的复杂程度,提高了系统的稳定性。
整个车辆分布式控制系统设计的重点和和难点都是驱动节点。驱动节点硬件电路设计上采用了模块化结构,由微控制器、CAN通信模块、信号采集模块、电机控制模块、参数设置模块组成,驱动节点的整体结构如图2所示。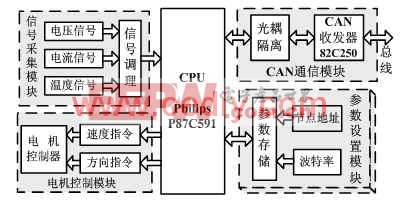
图2 驱动节点结构框图











评论