前馈-改进PID算法在智能车控制上的应用
 本文引用地址:http://www.eepw.com.cn/article/197879.htm
本文引用地址:http://www.eepw.com.cn/article/197879.htm图3 微分先行PID控制结构图
3 前馈控制的应用
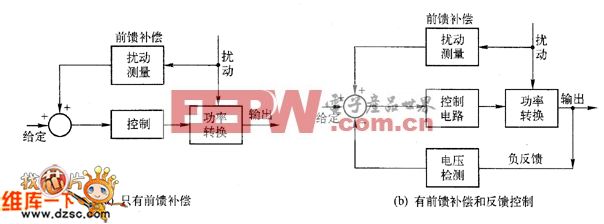
由于智能车的跑道宽度有限制,所以在经过急转弯的时候,如果速度和方向控制不及时,智能车就可能冲出跑道。由于前馈控制是开环控制,所以前馈控制的响应速度很快。将前馈控制引入到智能车的控制中,能够提高舵机和伺服电机的反应速度,改善智能车系统的动态性能。
3.1 智能车控制系统结构
智能车的控制主要体现在两个方面:一方面是方向的控制,也就是对舵机的控制;另一方面是对速度的控制,也就是对伺服电机的控制。舵机的数学模型较为简单,具有很好的线性特征,只采用前馈控制;智能车的速度控制相对复杂一些,速度模型无法准确建立,采用前馈-改进PID算法进行控制。智能车的控制系统结构如图4所示。
图4中, 和 分别是舵机和伺服电机数学模型。从图中可以看出,智能车的方向控制和速度控制是相互独立的,而且它们都是由路线偏差决定的。舵机转角与路线偏差之间的对应关系是根据舵机的数学模型得到的,在速度控制回路中,既包括反馈回路,又包括前馈环节,伺服电机的控制量是在前馈补偿基础上,再由增量式PID算法计算得到。
图4 智能车的控制系统结构
3.2 在方向控制中的应用
智能车对方向的控制有两点要求:在直道上,方向保持稳定;在转弯处,需要方向变化准确而且迅速。只有这样,才能保证智能车在跑道上高速、稳定地运行。为了提高方向控制的鲁棒性,本文还对路线偏差进行了模糊化处理。图5是智能车方向模糊前馈控制的结构图,图中和分别是直道和弯道两种情况下的前馈控制函数。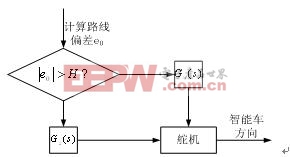
图5 智能车方向控制系统结构图
3.3 在速度控制中的应用
为了使智能车在直道上以较快速度运行,在转弯时,防止智能车冲出跑道,则必须将智能车的速度降低,这就要求智能车的速度控制系统具有很好的加减速性能。当智能车经过连续转弯的跑道时,路线偏差的频繁变化会造成速度设定的频繁变化,这会引起速度控制系统的振荡,并且微分环节对误差突变干扰很敏感,容易造成系统的不稳定。为了解决上述存在的问题,本文对数字PID算法进行了改进,将不完全微分和微分先行引入到PID算法中,大大改善了速度控制系统的动态性能。
图6 智能车速度控制系统结构图













评论