智能车速度控制系统设计与实现
—— Design and Implementation of Smart Car's Speed Control System

引言
本文引用地址:https://www.eepw.com.cn/article/108815.htm在智能车竞赛中,速度控制不能采用单纯的PID,而要采用能够在全加速、紧急制动和闭环控制等多种模式中平稳切换的“多模式”速度控制算法,才能根据不同的道路状况迅速准确地改变车速,实现稳定过弯。
系统硬件设计
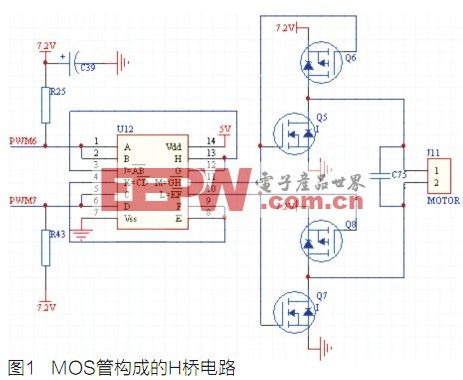
按照竞赛要求,本文设计的智能车速度控制系统,以飞思卡尔MC9S12DG128 单片机为核心,与车速检测模块、直流电机驱动模块、电源模块等一起构成了智能车速度闭环控制系统。单片机根据赛道信息采用合理的控制算法实现对车速的控制,车速检测采用安装于车模后轴上的光电编码器,直流电机驱动采用了由四个MOS管构成的H桥电路如图1所示,电源模块给单片机、光电编码器和驱动电机等供电。
系统建模
一个针对实际对象的控制系统设计,首先要做的就是对执行器及系统进行建模,并标定系统的输入和输出。为了对车速控制系统设计合适的控制器,就要对速度系统进行定阶和归一化。对此,分别设计了加速和减速模型测定实验。通过加装在车模后轮轴上的光电编码器测量电机转速。编码器齿轮与驱动轮的齿数比为33/76,编码器每输出一个脉冲对应智能车运动1.205mm。车模可以通过调节加给电机的PWM波的占空比进行调速。单片机上的PWM模块可以是8位或16位的,为了提高调速的精度,电机调速模块选用16位PWM,其占空比调节范围从0到65535,对应电机电枢电压从0%到100%的电池电压。










评论