图像采集与处理在智能车系统中的应用

摘要:在智能车系统的设计中,路径识别的准确性直接影响到智能车能否正确地行驶。以摄像头作为路径识别的传感器能够有效地提高智能车的前瞻性,但原始图像的数据量相对单片机来说是比较庞大的。本文采用了硬件分频的方法对图像数据进行了有效的压缩,并对图像对进行二值化和去除噪声的预处理。大量的实验结果表明,该方案能够实现路径识别的正确性与快速性。
本文引用地址:https://www.eepw.com.cn/article/108814.htm智能车系统以一个标准的汽车模型作为载体,要求实现在白色场地上,根据系统采集到的路面状况作出路径识别,并实现转向和车速的控制,使其自动地沿着一条任意给定的黑色带状引导线行驶,在保证稳定性的前提下以最短的时间完成自动寻迹。
路径识别在智能车系统中,可以比作是智能车的眼睛,是智能车能够正确行走的基础。路径识别的方法主要有光电传感器和CCD/CMOS摄像头传感器两种方式,与光电传感器相比,摄像头传感器具有较好的快速性、前瞻性,能够感知智能车前方更远距离的赛道变化,提取有效信息,从而为智能车快速、平稳的前进、转弯以及制动控制提供更好的判断依据[1],因此本文采用了标准信号输出(PAL制式)的CMOS摄像头作为系统的视觉传感器。摄像头原始的图像大小是628*582相素,这对单片机来说是一个相对较大的数据量,因此如何将原始图像进行高效压缩是系统的一个关键基础,同时图像的预处理也是系统的的一个关键技术。本文提出了一种高效的图像压缩方法,并且提出了一种有效的图像预处理方法。
1 系统概述
智能小车系统主要由路径识别、速度采集、转向控制及车速控制等功能模块组成。路径识别功能采用CMOS摄像头,将其模拟量的视频信号进行视频解码后,经过二值化处理并转化为18×90pix的图像数据后送入MCU进行处理;转向控制采用基于模糊控制算法进行调节;而车速控制采用的是经典PID算法,通过对赛道不同形状的判断结果,设定不同的给定速度。该系统以50Hz的频率通过不断地采集实时路况信息和速度,实现对整个系统的闭环控制,如图1所示。

2.智能小车的图像采集与存储
2.1 图像采集模块设计
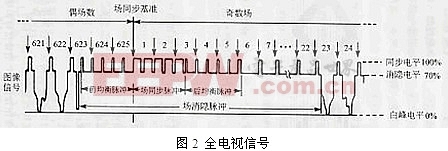
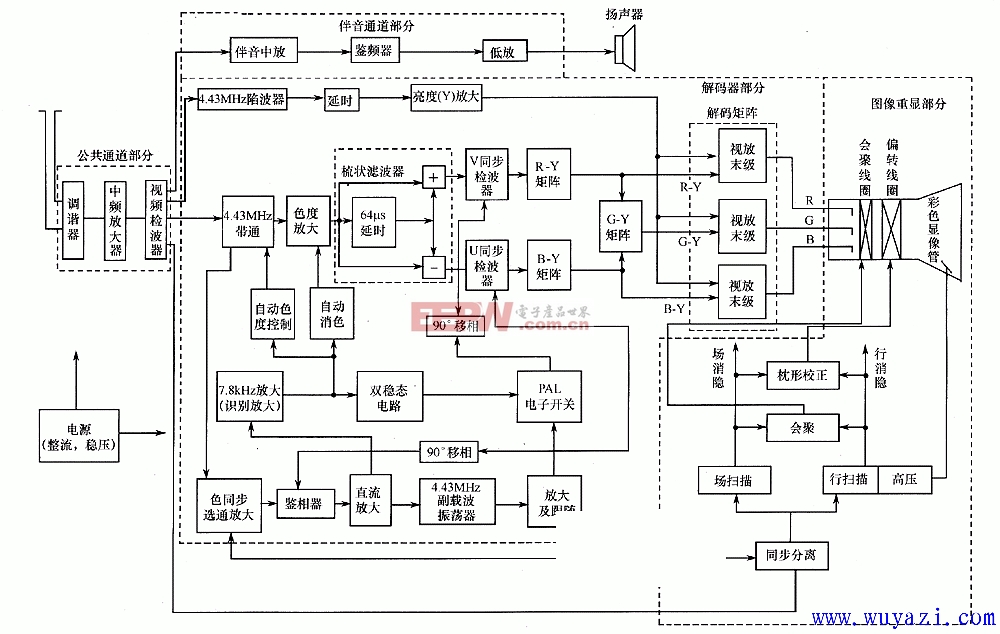
CMOS摄像头正常供电后,便可输出原始图像的信号波形,它是PAL制式的模拟信号,包含行同步、行消隐、场同步、场消隐等信号如图2所示。但该形式的信号并不能被CPU直接使用,需要加入视频解码芯片如SAA7111,它的功能是将摄像头输出的模拟信号转化为数字信号,同时产生各种同步信号,CPU利用此同步信号将图像的数字信号存储在一个外部FIFO芯片AL422中,这便构成了基本的路径检测模块,如图3所示。


pid控制相关文章:pid控制原理







评论