- 摘要:本文引入了一种新型的软开关PFC电路,首先分析了开关电源的发展历程,然后讲了谐波给公共电网造成的危害,再给出了这种软开关PFC的电路拓扑及原理图并对其工作原理进行了分析,最后对其参数进行设置在MATLAB软
- 关键字:
分析 仿真 电路 PFC 开关 新型
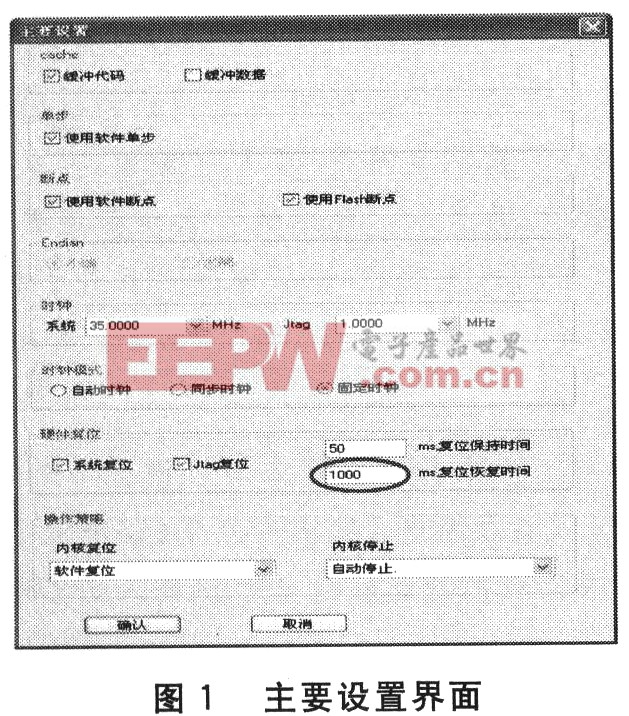
- TKScope仿真/烧录BootLoader方法, 在ARM9内核的开发中,烧录和仿真BootLoader程序一直是研发工程师头痛的事情。原因是没有高效的BootLoader下载程序和模仿BootLoader加载的仿真。因此整个BootLoader的调试开发效率不高。
TKScope支持ARM芯片
- 关键字:
方法 BootLoader 烧录 仿真 TKScope
- 1 引言在初学者用传统拉弦乐器练习演奏时,难免会发出较大且难听的声音,事实上,即使演奏水平达到一定程度也会产生噪声污染。特别是乐器教学,当多个学生在一起练习时,产生的声音既会相互干扰,也会干扰邻近教室的
- 关键字:
仿真 电子琴 教学系统
- 直接数字频率合成技术(Direct Digital Synthesize,DDS)是继直接频率合成技术和锁相式频率合成技术之后的第三代频率合成技术。它采用全数字技术,并从相位角度出发进行频率合成。随着微电子技术和数字集成电路的飞速
- 关键字:
Verilog HDL DDS 仿真
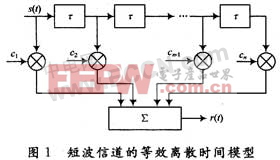
- 1 引 言自无线电技术发明并得到广泛应用以来,依靠电离层进行传播的短波通信就成为远距离无线通信的主要手段。为了有效训练通信装备操作人员,过去,在教学训练单位,通常大量时间用在装备原理的理论讲解上,由于不能
- 关键字:
信道 分布式 实时 仿真 短波 系统 通信 训练 模拟 综合
- 摘 要:滤波是抑制传导干扰的一种常用方法,为了提高滤波器性能和缩短开发时间,针对DC-DC开关电源介绍一种简单且效果良好的滤波器设计方法。阐述EMI电源滤波器的基本原理、拓扑结构、设计原则和滤波器件的高频特性
- 关键字:
仿真 设计 滤波器 EMI 开关电源 电源
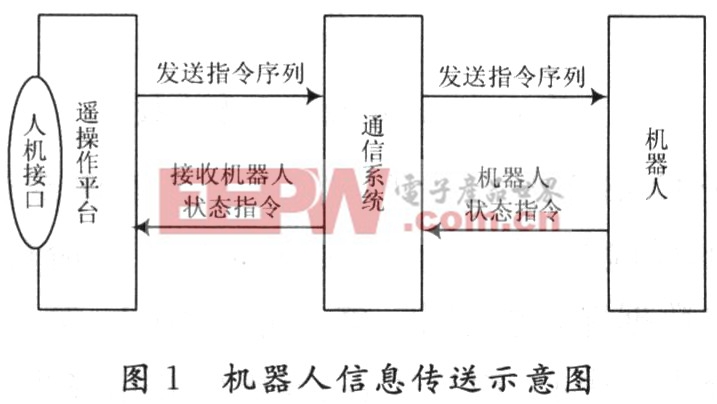
- 摘 要:针对移动机器人的远程操作问题,基于C++Builder软件环境,设计和实现了一种移动机器人的遥操作接口系统,可利用方向盘、键盘和鼠标来操作机器人的移动。基于此接口系统建立了遥操作系统原型,并且进行了室内
- 关键字:
设计 实现 系统 接口 机器人 操作 移动
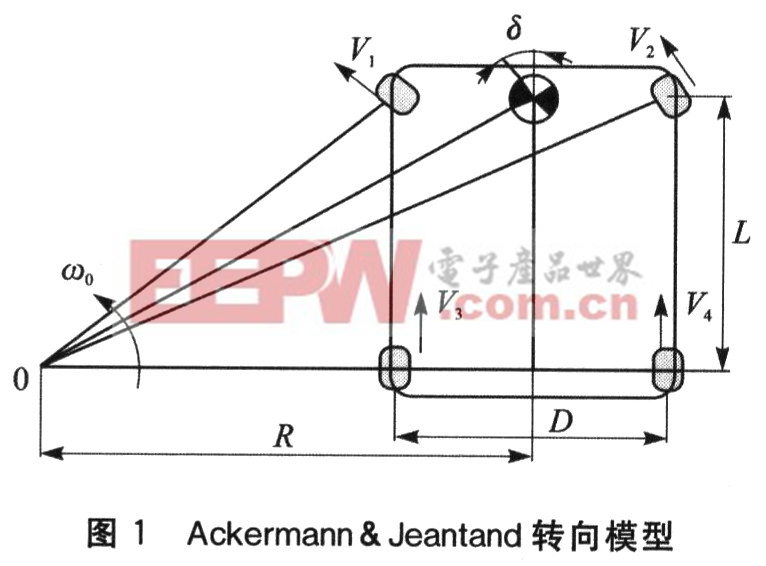
- 基于实时内核的电动车电子差速算法仿真,摘要 设计了一种基于嵌入式实时内核ARTXl66的电动车电子差速算法,介绍了基于Ackermann-Jeantand 转向模型的四轮速度关系、电子差速算法,并用MatIab/Simulink进行了仿真。通过实车试验证明了该算法的可行性。
关键
- 关键字:
算法 仿真 电子 电动车 实时 内核 基于
- 在对直接序列扩展频谱通信系统工作原理的介绍及Simulink工具箱功能和特点的介绍的基础上,建立起一个DS-SS通信系统的仿真模型,并得到了较好的运行结果。证明了Simulink在通信系统仿真中的实用性,并为扩展频谱通信系统的进一步研究提供了一个快捷灵活的平台,为建模提供了经验积累
- 关键字:
通信 系统 仿真 研究 频谱 扩展 Simulink 直接 序列 基于 射频
- 1 引言
随着现代武器与航天技术的发展,要求雷达应具有高精度、远距离、高分辨力等性能。简单矩形脉冲雷达存在雷达探测能力与距离分辨力之间的矛盾。为解决这一矛盾,大多数现代雷达采用脉冲压缩技术,调制信号
- 关键字:
FPGA 脉冲压缩 仿真
- 该系统克服了传统有线抄表方式的弊端,传输数据量大、准确性高、通信费用低。其基于Proteus技术,组网灵活、易于扩展,使设计与施工的难度和成本得以降低,具有良好的开放性、可靠性和可扩充性,有着重要的现实意义与广阔的发展前景。
- 关键字:
Proteus 远程抄表 系统设计 仿真
- 提出了一种宽频段接收机的设计方案,分析了混频方案的合理性并进行了验证,对整个系统进行建模和仿真。系统性能仿真显示了该设计方案有良好的中频增益及大于90 dBc的镜像抑制特性。
- 关键字:
宽频带 接收系统 建模 仿真

- 摘 要:新的电子器件不断涌现,当需要新器件的模型进行仿真或制作印制电路板时,原有的Multisim元器件库就不能满足用户的需求,需建立与编辑新元器件。介绍利用Maxim公司高亮LED驱动器MAXl6823的Spice模型在Multisim
- 关键字:
电路 仿真 应用 驱动 LED 调制 高亮 Multisim
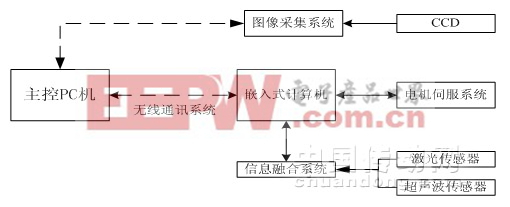
- 排爆机器人控制与无线通讯系统,引言 排爆机器人属于搬运机器人的一种类型,很多搬运机器人是模仿人类的动作,用来帮助或部分代替人来进行繁重、危险、重复等工作。排爆机器人模仿人类的行走、抓取物体的动作,可以被用来排除现场的爆炸物。排爆
- 关键字:
通讯系统 无线 控制 机器人 排爆 排爆机器人 控制系统 网络化 Linux
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473



